¶ 1. 简介
Creality RaptorX是一款计量级三维扫描仪,最高精度可达0.02mm,无线扫描,拥有蓝光、白光、红外三种光源,可同时实现中大型物体交叉线(34条线)高速扫描、平行线(7条线)精细扫描、红外扫描。适用于汽车零部件、逆向工程、产品设计、能源工程、重工业等领域中大型复杂部件扫描,可实现全尺寸检测、逆向设计、3D打印、增材制造等应用,也适用于人体、人脸、文物等目标的扫描。
无线扫描手柄让RaptorX摆脱了线材的束缚,拥有非常好的便携性。无线扫描的时候,手机可以作为扫描仪屏幕,让扫描过程更加轻松自在。
¶ 2. 扫描配置
Creality RaptorX包含两种扫描模式:蓝色线激光扫描和红外扫描。
¶ 蓝色线激光模式
蓝色线激光适合对精度和细节要求较高的扫描,需要圆形反光标记点辅助扫描,对于较小的物体,可以将标记点贴在桌面或扫描垫上,然后将物体放在桌面或垫子上扫描,对于较大的物体,需要将标记点贴在物体表面。
.png)
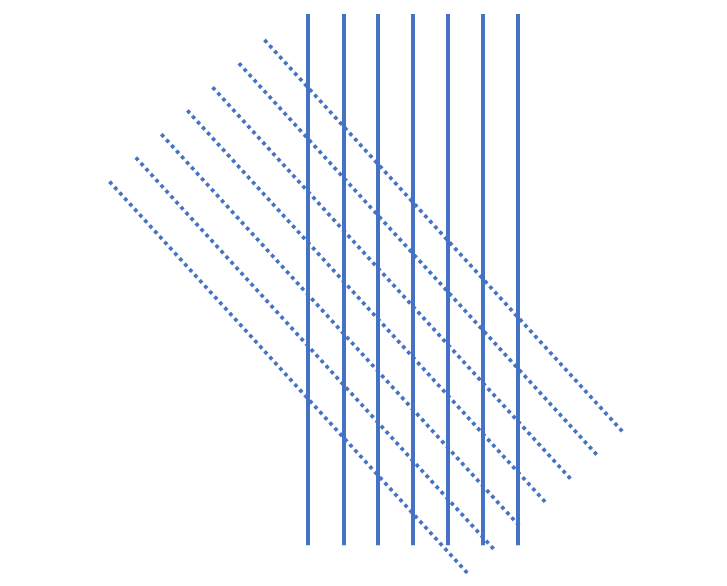
交叉线用于扫描大物体,平行线用于扫描小物体或局部细节。
¶ 红外模式
适合扫描较大的目标,如面部、身体和雕塑(150-2000mm)。它可实现无标记扫描,还支持基于标记的扫描和纹理特征扫描。

¶ 3. 基本术语和概念
¶ 扫描距离
所有扫描仪的精度都与扫描距离有关。RaptorX 扫描仪的最小工作距离为 150 mm,最大距离可达 1000mm。扫描仪应与物体保持适当的距离,以确保可靠跟踪而不损失精度。按照扫描软件提供的说明保持“最佳距离”。
| 扫描模式 | 扫描距离 |
|---|---|
| 平行线 | 150-400mm |
| 交叉线 | 200-600mm |
| 红外模式 | 170-1000mm |
¶ 曝光
Creality Scan提供两种相机曝光控制模式:自动曝光和手动曝光。
对于较大的目标,如面部,可以使用自动曝光进行扫描。对于较小的物体,自动曝光可能不准确。建议手动调整相机的曝光时间。
对于红外模式,调整红外相机的曝光时间,使基准点有足够的亮度,但不会过度曝光。红外图像窗口中标记为红色的区域表示过度曝光的区域。
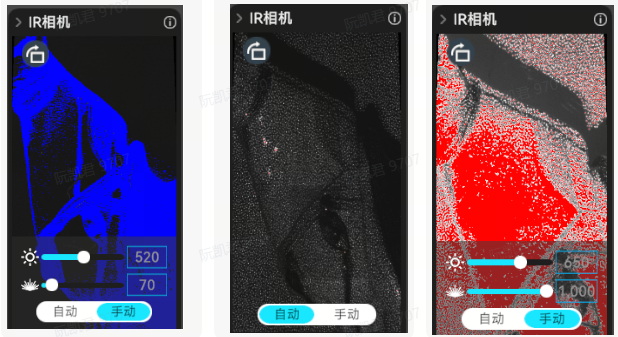
对于蓝色线激光扫描,我们建议用户手动调整激光亮度和相机曝光时间以获得更好的扫描质量。然后,调整激光线的亮度,使其具有足够的亮度但不会过度曝光。
理想的状态是标记点和激光线都足够亮但又不会过度曝光,如下图所示(左图:期望的曝光和激光亮度;中图:标记点和激光线都过度曝光了;右图:标记点和激光线都曝光不足)。
¶ 标记点
要使用 RaptorX 的蓝色线激光模式,需要使用反射式圆形标记点来辅助扫描。当物体较小时,标记点无需贴在物体表面;可以将其放在扫描垫或桌面上。但是,当物体较大时,需要将标记贴在物体表面,如下图所示。请注意,标记应随机放置。

¶ 框架点扫描
对于较大的物体,我们建议先扫描全局标记点,然后再扫描点云。按照这种方法可以提高扫描精度。
.png)
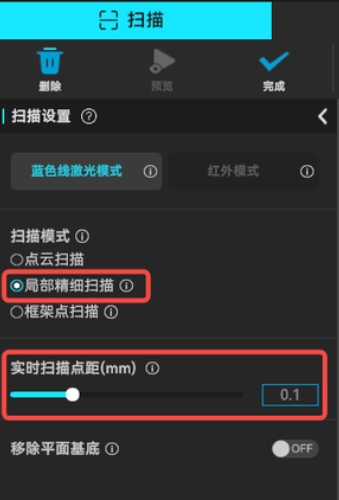
¶ 局部细节扫描 (只支持蓝色线激光模式)
使用较大的点距扫描大型物体(如汽车)是合理的,但如果我们还想要良好的细节,我们该怎么做?
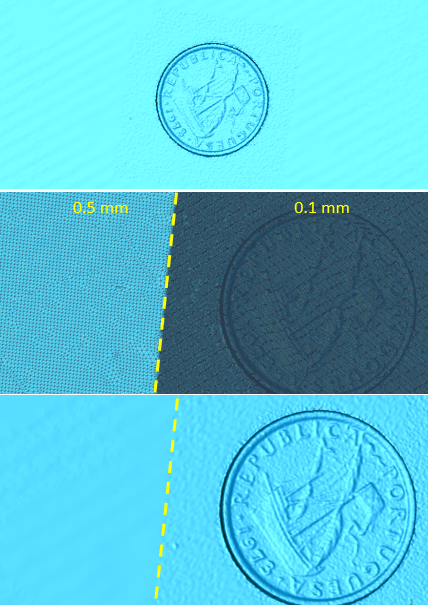
局部细节扫描功能提供了解决方案:首先,使用较大的分辨率(例如 1mm)进行快速扫描。对于某些需要更精细细节的区域,我们可以利用局部细节扫描功能以较小的分辨率(例如 0.2mm)扫描这些特定区域,捕捉丰富的几何细节。
.png)
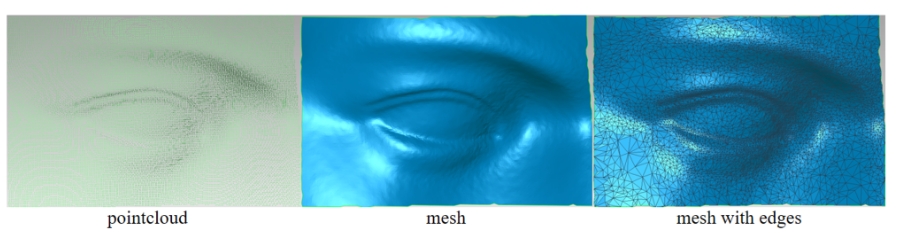
这里是局部细节扫描的例子。首先以 0.5 毫米的分辨率扫描整个目标,然后以 0.1 毫米的分辨率扫描硬币。注意不同区域的三角网格密度。
¶ 扫描速度
对于蓝色线激光扫描,扫描速度受计算机性能和硬盘速度影响。为了获得更好的性能,我们建议用户使用固态硬盘 (SSD) 或高速机械硬盘。GPU对帧速率有显著影响。Creality Scan 软件允许用户手动选择显卡。
.png)
¶ 质量色谱图
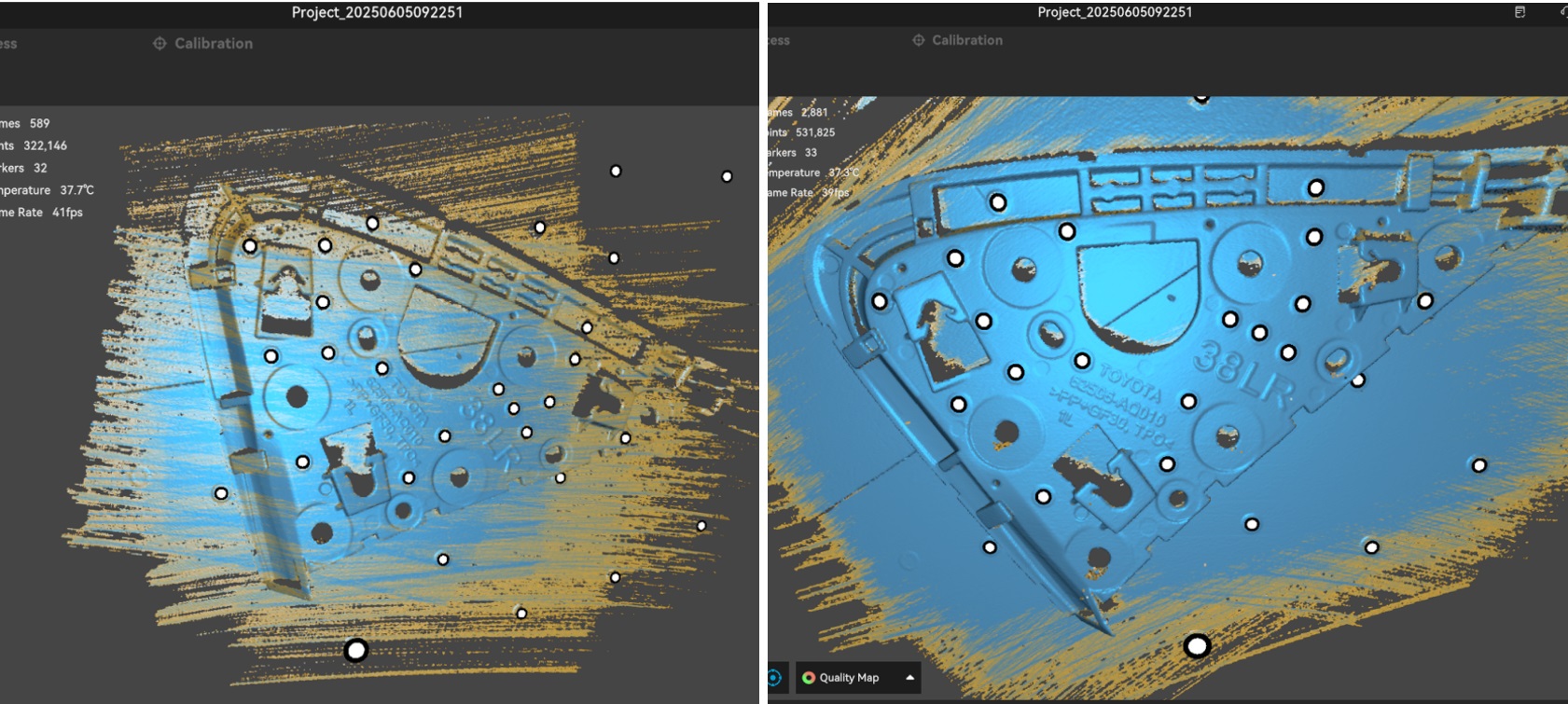
在扫描过程中,Creality Scan 会提供点云的质量色谱来指示当前的扫描质量是否足够高。
对于蓝色线激光扫描,应改持续扫描直到模型的质量图谱变成蓝色。 黄色表示扫描不够充分。
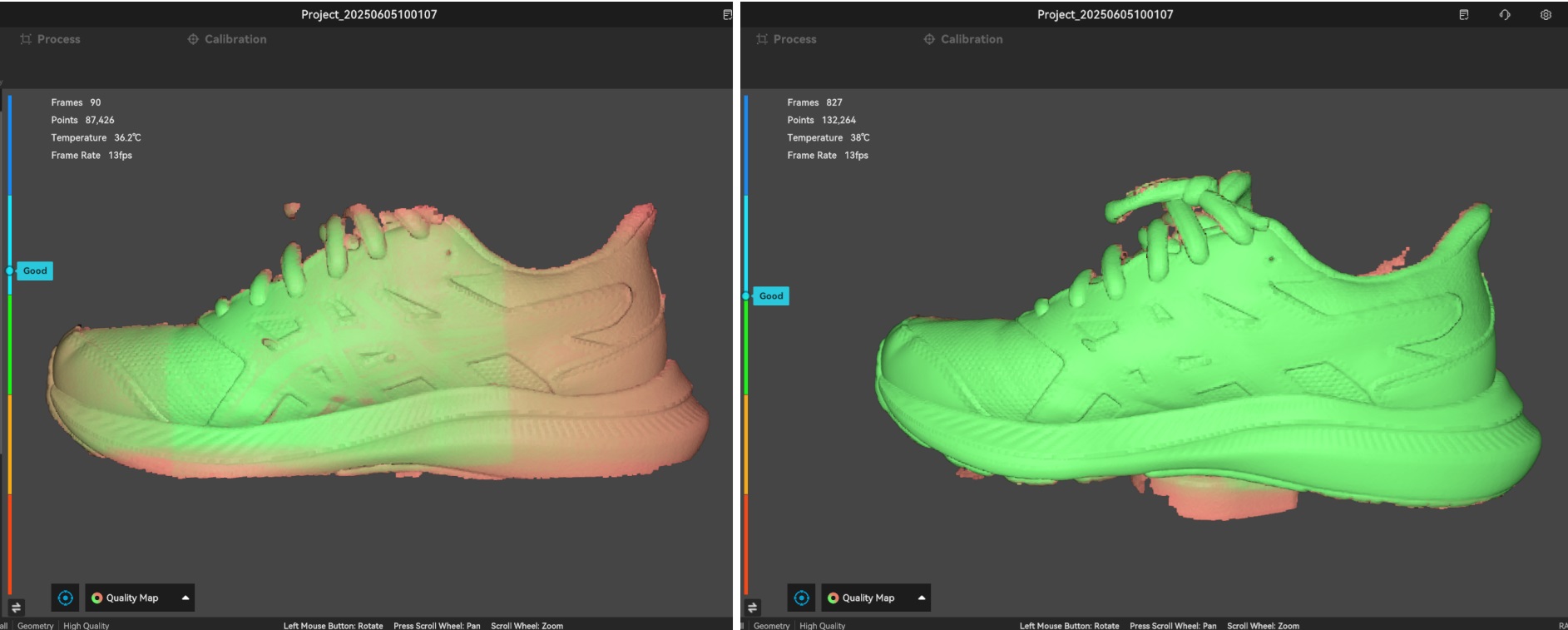
对于红外扫描模式,左侧的物体呈现出红色和绿色的混合色,表示扫描的点云质量相对较差,而右侧的物体呈现出均匀的绿色,表示扫描的点云质量相对较好。
¶ 点距
扫描过程结束后,需要进行点云融合,将扫描的多帧点云(几百甚至几千帧)进行融合,得到更高质量的点云。
点距是此过程的重要参数之一。点距设置越小,捕获模型中的细节越多,但处理时间也越长。但是,点距设置过小(例如 0.02 毫米),可能会导致模型的某些部分缺失。
当处理较小的物体(例如 25 厘米以下的物体)或寻求更好的细节时,建议将点距设置为 0.1 毫米或 0.15 毫米。使用 0.1 毫米的点距,我们可以为大多数物体实现足够好的细节。
对于蓝色线激光模式,软件要求用户设置两种点距:实时扫描点距和点云融合的点距。
对于红外模式,仅需要设置点云融合的点距。
¶ (1)实时扫描阶段的点距
影响实时扫描渲染的质量,和影响最终的3D模型。点距越小,实时扫描渲染的模型越精细,但会消耗更多的内存。对于较小的物体,建议设置较小的点距。例如扫描10cm的部件时,可以将分辨率设置为0.15mm。对于较大的物体,我们建议使用较大的点距进行扫描。例如扫描车门时,可以将点距设置为0.5mm。
.png)
如果使用较大的点距进行扫描,如何才能获得良好的细节?您可以利用软件提供的局部细节扫描功能。例如,先以0.5mm的点距扫描整个物体,然后选择需要增强细节的区域,以0.1mm的点距进行局部细节扫描,以获得该区域的几何细节。
¶ (2)点云融合中的分辨率。
它将直接影响最终模型的细节。点距越小,细节越好,但需要更多的处理时间和内存。对于大多数物体,0.1mm 的点距可以实现良好的细节。如果使用 0.02mm 的点距,处理时间和内存将急剧增加。对于较大的物体,建议使用较大的点距。例如,扫描车门时,可以使用 0.5mm 的点距。
对于交叉线扫描,我们建议将点距设置为0.2mm以上,因为交叉线扫描主要用于中型到大型物体。
.png)
降噪等级: 该值越低,保留的数据越多。
移除标志点: 该功能仅在使用蓝色激光扫描或跟踪模式设置成标志点时显示,用于移除标志点并填充相应的孔洞。
超级细节(仅在使用蓝色线激光扫描时显示): 启用后,点距可设置为更小值。(电脑内存大于 8GB 时才会生效)
Creality Scan软件允许用户多次进行点云融合,例如,如果你对当前的融合结果不满意,可以修改参数并重新运行点云融合步骤。
¶ 一键处理
一键处理功能适合对 3D 扫描仪没有太多经验的新手使用,如果您对扫描质量要求较高,不建议使用一键处理功能,建议手动调整每个处理步骤的参数。
.jpg)
¶ 模型编辑
Creality Scan 提供点云编辑功能。
扫描完成后,可以立即使用点云编辑功能去除不需要的部分,这可以加速数据处理过程。
| 图标 | 功能说明 |
|---|---|
| 贯穿选择,支持选择选定区域后方的网格。对于原始点云数据,穿透选择默认始终生效,无法禁用 | |
| 套索,随鼠标滑动选中区域 | |
| 矩形,矩形选中区域 | |
| 连通域,选中点击区域所有相互连接的点 | |
| 反选,自动选择反向未选择区域 | |
| 取消选择 | |
| 删除,删除选中的部分。 | |
| 撤消,撤消上一次删除的操作。 | |
| 还原,恢复上一次删除的操作。 | |
| 取消编辑 | |
| 保存编辑 |
.png)
¶ 封装
封装操作将点云数据转换成三角网格模型。
在封装过程中,您可以手动配置生成网格的面数、调整网格平滑程度、设置孤立项移除百分比,以及选择是否去除尖刺、填充孔洞和封闭模型。
网格的面越多,模型越精细,但生成网格所需的时间也越长。
.png)
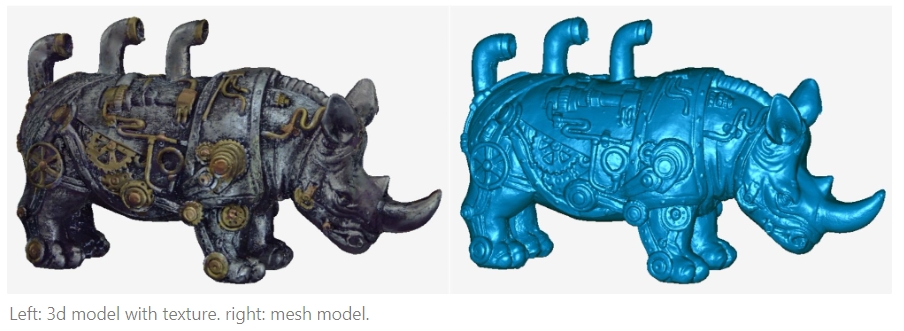
¶ 彩色贴图
Raptor 扫描仪配备高清 RGB 摄像头,可以捕捉 3D 模型的真彩纹理。
完成封装后,如果在扫描设置中开启了彩色贴图功能,可以点击 网格处理->彩色贴图进行贴图。

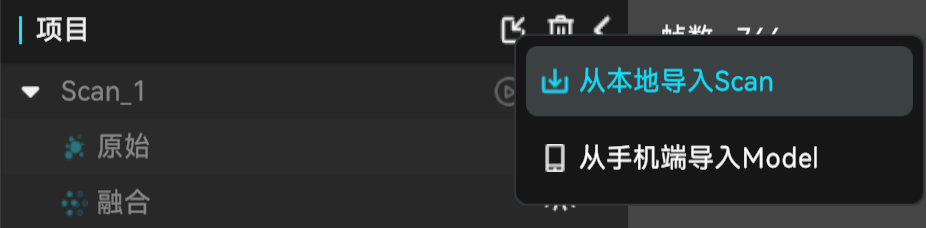
¶ 导入扫描文件
使用PC扫描时,如果您没有时间等待后期处理完成,可以点击“完成”,并在以后使用“导入扫描文件”功能将扫描项目文件导入软件进行进一步处理。
¶ 拼接
如果无法一次性扫描捕获物体所有数据,您可以进行多次扫描,然后通过拼接功能将它们组合成一个完整的模型。这对于扫描较大的物体非常有用。
.png)
当然,你可以取消拼接。
¶ 如何扫描物体的底部?
当您需要扫描物体的底部时,您可以将物体放在桌面上,先扫描可见部分。然后,创建一个新的扫描并将物体侧放或倒置,以进行另一次扫描。使用拼接功能将这两组点云合并在一起,创建物体的完整 3D 模型。在两次扫描期间,请确保捕获了足够的重叠区域。
完成第一次扫描并执行点云融合后,您可以通过选择“新建扫描”来开始新的扫描。
.png)
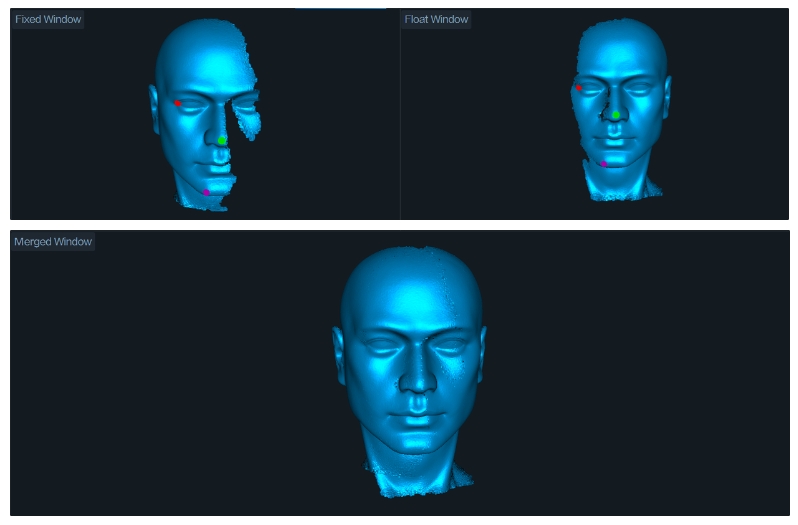
在拼接页面上,您可以自动或手动合并融合的点云。以下是手动特征拼接的示例。
¶ 无线扫描
RaptorX支持无线扫描,可以使用智能手机作为扫描仪的显示屏。连接扫描仪和无线手柄,无线扫描手柄工作时会创建一个无线局域网(WLAN)。将电脑连接到手柄的WiFi,这样扫描仪就可以通过WiFi连接到电脑。
如果需要将手机作为扫描仪的显示屏,请将手机连接到手柄的 WiFi。点击软件中的移动端选项,即可将计算机扫描显示镜像到智能手机屏幕上。此处需要扫描二维码。
了解更多:https://wiki.creality.com/en/3d-scanner/raptorx/wireless-scan
无线扫描时,建议手动设置相机曝光时间和激光亮度,相机曝光时间不宜过长,激光线也不要过曝,否则会导致扫描过程不够流畅。
¶ 4. 扫描技术
(1)如何避免“线伪影”?
a)分辨率不要设置得太小,0.1mm的分辨率对于大多数物体来说,已经足够捕捉到细节。分辨率太小,扫描出来的模型细节会比较多,但也容易出现线伪影。
b)使用合适的相机曝光时间和激光强度,保证激光线有足够的亮度,但不要让激光线过曝(过曝的部分会呈现红色)。
c)对于平行线,请以十字交叉的方式扫描同一区域。
d) 扫描足够数量的帧,使模型质量色谱颜色图变为蓝色(蓝色线激光模式),绿色(红外模式)。
(2)如何扫描整辆车?
a) 在车身上放置足够的标记。
b) 对于 RaptorX,您可以先使用 框架点 扫描模式扫描标记点。
c) 之后,切换到点云扫描模式扫描汽车表面。
d) 对于这种大物体,应该使用交叉线。
¶ 5. 扫描案例
¶ 机械零件
后视镜饰条
尺寸:220x130x25(mm)
设置:蓝色激光,平行线,无色,分辨率0.1mm,4000帧

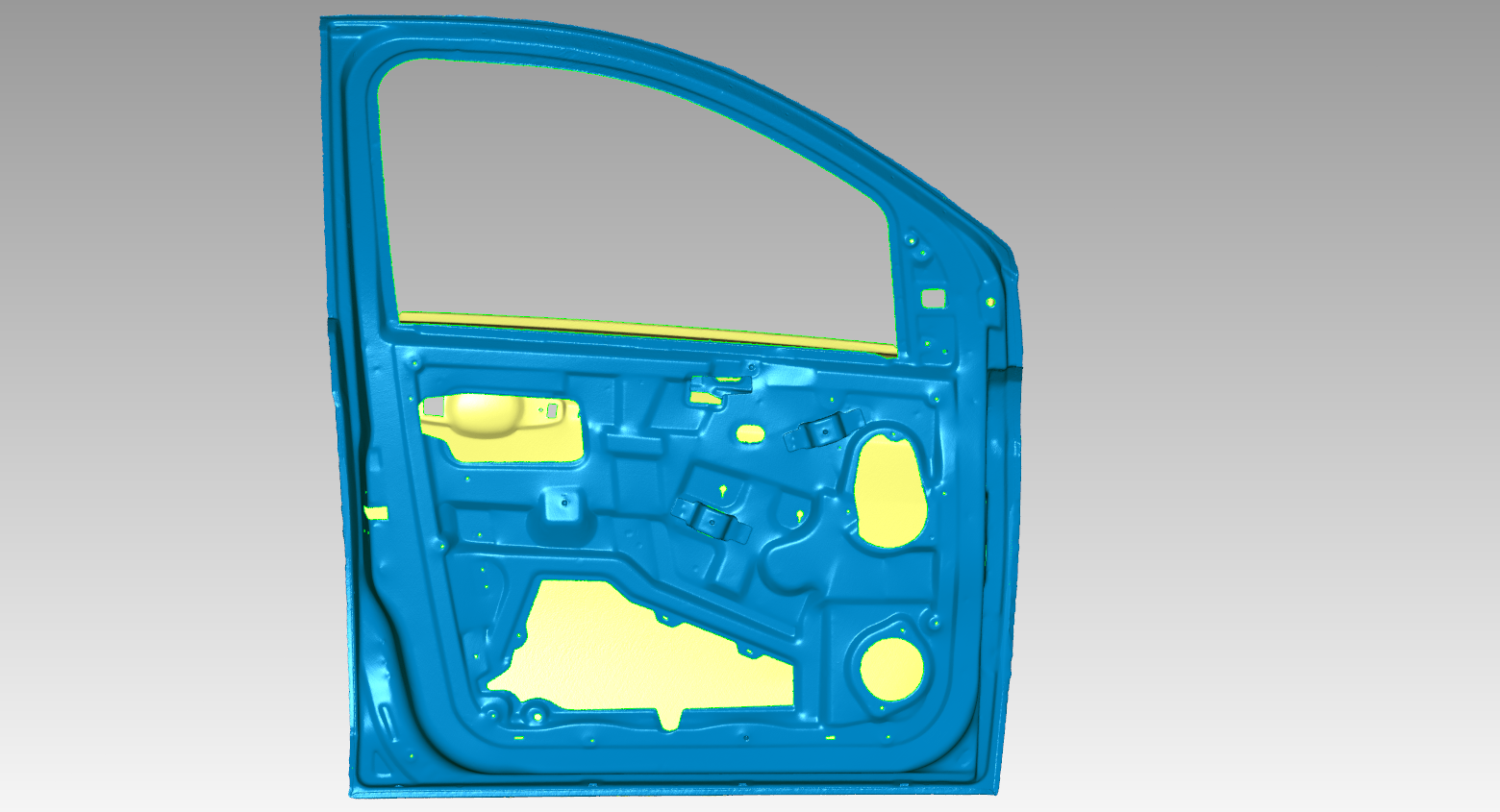
车门
尺寸:989x1185x140(mm)
设置:蓝色激光,交叉线,无颜色,分辨率0.6mm,22643帧,点云合并
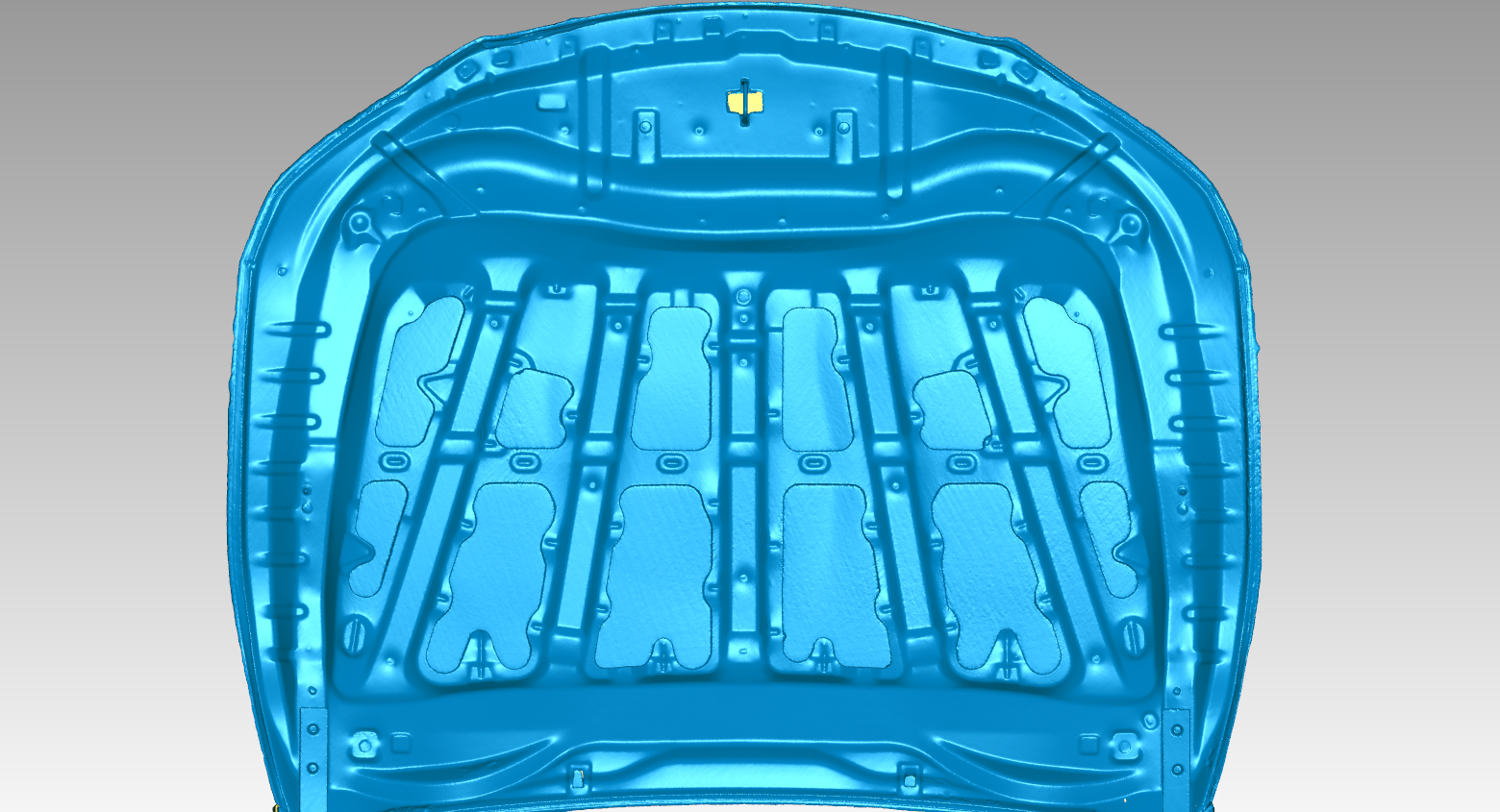
汽车发动机罩
尺寸:1200x1518x60(mm)
设置:蓝色激光,交叉线,无色,分辨率0.8mm,34117帧,点云合并
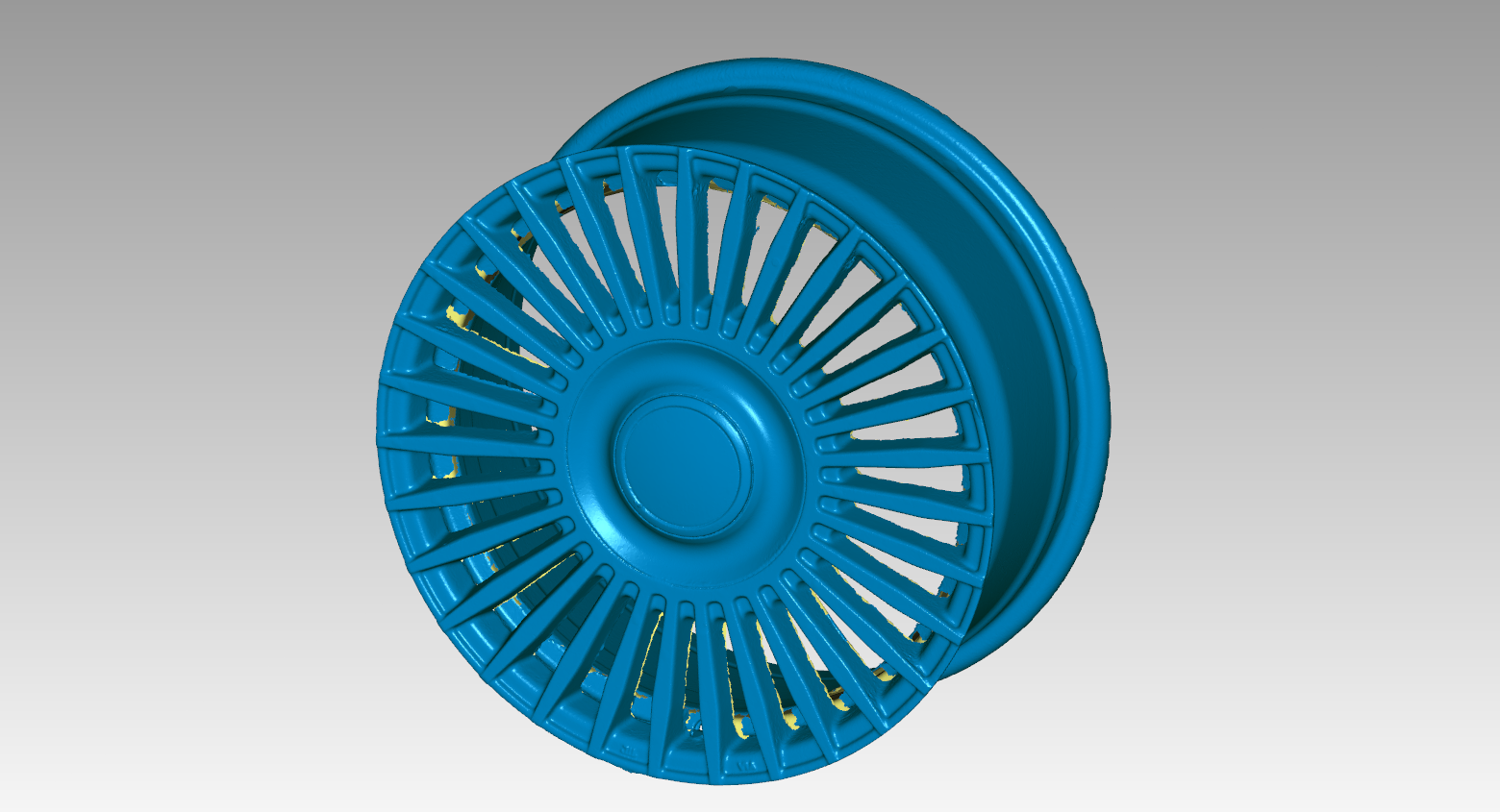
车轮
尺寸:512x512x217(mm)
设置:蓝色激光、交叉线、无色、分辨率0.5mm、31157帧、点云合并
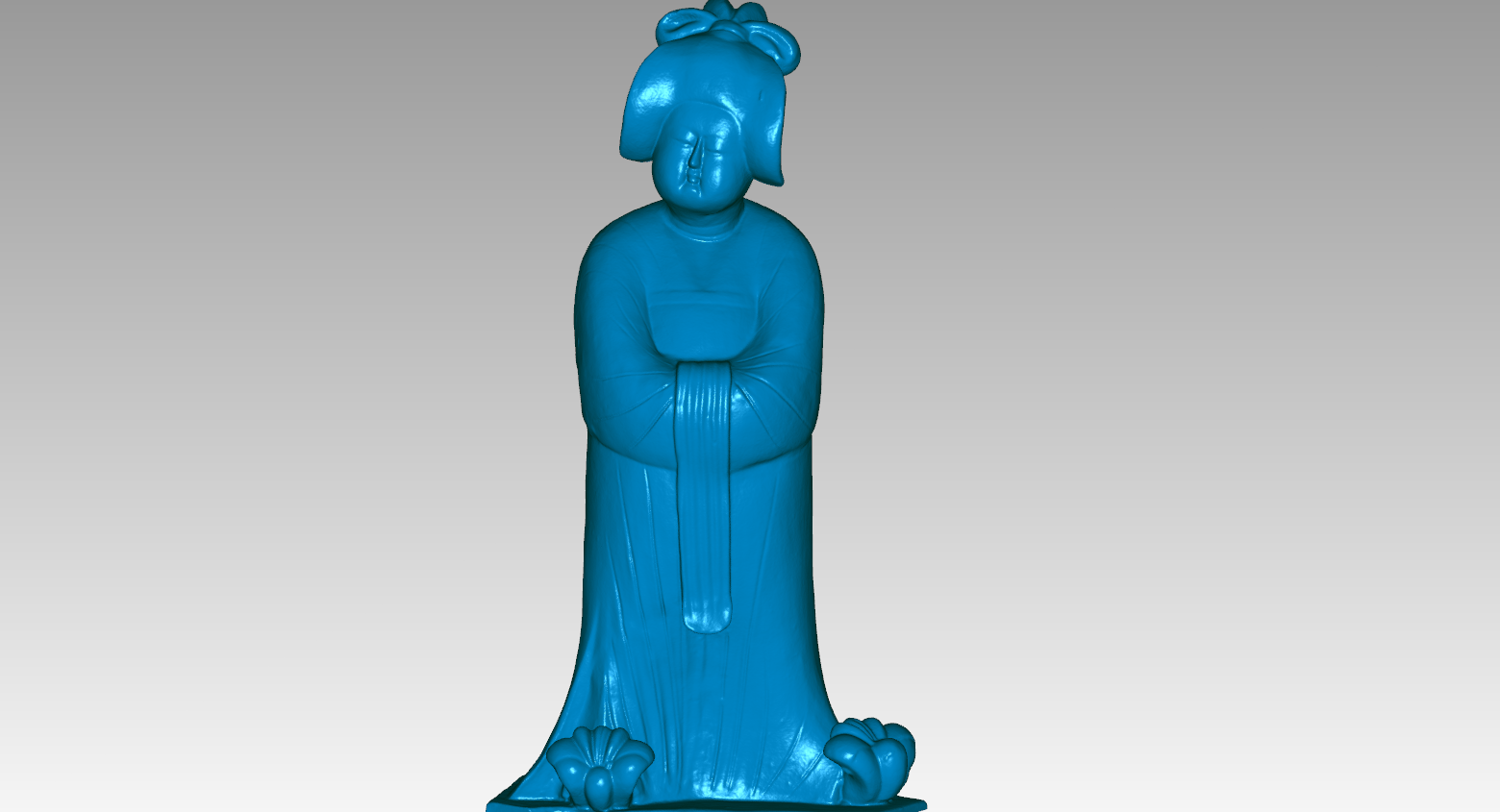
¶ 雕塑
陶俑
尺寸:933x495x217(毫米)
设置:红外线,大型高品质几何图形,颜色,分辨率0.8毫米,4079帧

太阳神
尺寸:933x495x217(mm)
设置:红外、大、高质量、几何、颜色、分辨率 0.8mm、5872 帧


