¶ 1. 概述
CR-Scan Raptor是一款具有计量级精度的3D扫描仪,最高精度可达0.02mm。它采用蓝色平行七线激光和230万像素高分辨率相机进行扫描,能够产生更丰富的细节、更锐利的边缘,准确还原物体的3D形状。采用大景深、低畸变全玻璃镜头,从小物体(如硬币或螺栓)到大物体都可以轻松扫描(5-2000mm)。
此外,它还融合了红外结构光技术,可以实现无标记点扫描,并能够扫描人脸、人体、文物等对象。它具有高精度、广泛适用性、对喷粉依赖性低,并且可以直接扫描许多黑色和金属物体。与其他工业级线激光3D扫描仪不同的是,它还可以获取物体表面的全彩纹理。配备了12个白色LED补光灯,即使在黑暗的环境中也能获得清晰的纹理。

¶ 2. 扫描配置
CR-Scan Raptor包括两种扫描模式:蓝色线激光扫描和红外扫描。
.png)
蓝色线激光模式适用于需要更高精度和细节的扫描。它需要圆形反光标记点辅助扫描。对于较小的物体,可以将标记点贴在桌面或扫描垫上,然后将物体放在桌面或垫子上进行扫描。对于较大的物体,需要将标记点贴在物体表面上。

红外模式适用于扫描较大的目标,如面部、身体和雕塑(150-2000毫米)。它支持无标记扫描,并且还支持基于标记的扫描和纹理特征扫描。
¶ 3. 基本术语和操作
¶ 3.1 扫描距离
所有3D扫描仪的精度都与扫描距离相关。通常,扫描仪越接近目标,同时又能获取点云,准确性就越高。Raptor扫描仪的最小工作距离为150 mm,最大距离可达1000 mm。扫描仪应与物体保持适当距离,以确保可靠跟踪而不会失去准确性。扫描过程中,请按照扫描软件提供的指示,保持“最佳距离”。
| 扫面模式 | 扫描距离 |
|---|---|
| 蓝色激光 | 150-400mm |
| 红外 | 170-1000mm |
.png)
¶ 3.2 标记点
要使用CR-Scan Raptor的蓝色线激光模式,需要使用反光圆形标记点辅助扫描。当物体较小时(如下图中的儿童玩具枪),标记点不需要贴在物体表面上,它们可以贴在扫描垫或桌面上。然而,当物体较大时,需要将标记点贴在物体表面上,如下图中的汽车扫描。请注意,标记点应随机放置。

¶ 3.3 曝光时间
Creality Scan提供两种相机曝光控制模式:自动曝光和手动曝光。
对于较大的目标,如人脸,可以使用自动曝光进行扫描。
对于较小的物体,自动曝光可能不准确。建议手动调整红外相机的曝光时间。
对于红外模式,调整红外相机的曝光时间,使基准点有足够的亮度,但不会过度曝光。红外图像窗口中标记为红色的区域表示过度曝光的区域。
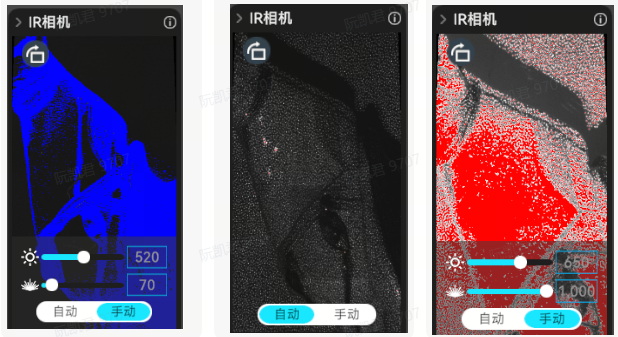
对于蓝色线激光模式,我们建议用户手动调整相机曝光时间和激光线的亮度,以获得更好的扫描质量。期望的状态是:使得标记点和激光线都足够明亮,但不过曝,如下图所示。
调节的方法是:先调整相机曝光时间,使得标志点曝光适中;再调整激光线亮度,使得激光线亮度适中。
相机曝光和激光线亮度调整. 左:相机曝光和激光线亮度适中; 中:标记点和激光线均过曝;右:标记点和激光线的亮度均不足。
¶ 3.4 扫描速度
对于线激光扫描,扫描速度会受计算机性能和硬盘速度的影响。为了获得更好的性能,我们建议用户使用配置较高的电脑(CPU i7以上,独立显卡的显存6GB以上),以及固态硬盘(SSD)或高速机械硬盘。Creality Scan 软件允许用户手动选择显卡。
.png)
¶ 3.5 扫描质量色谱图
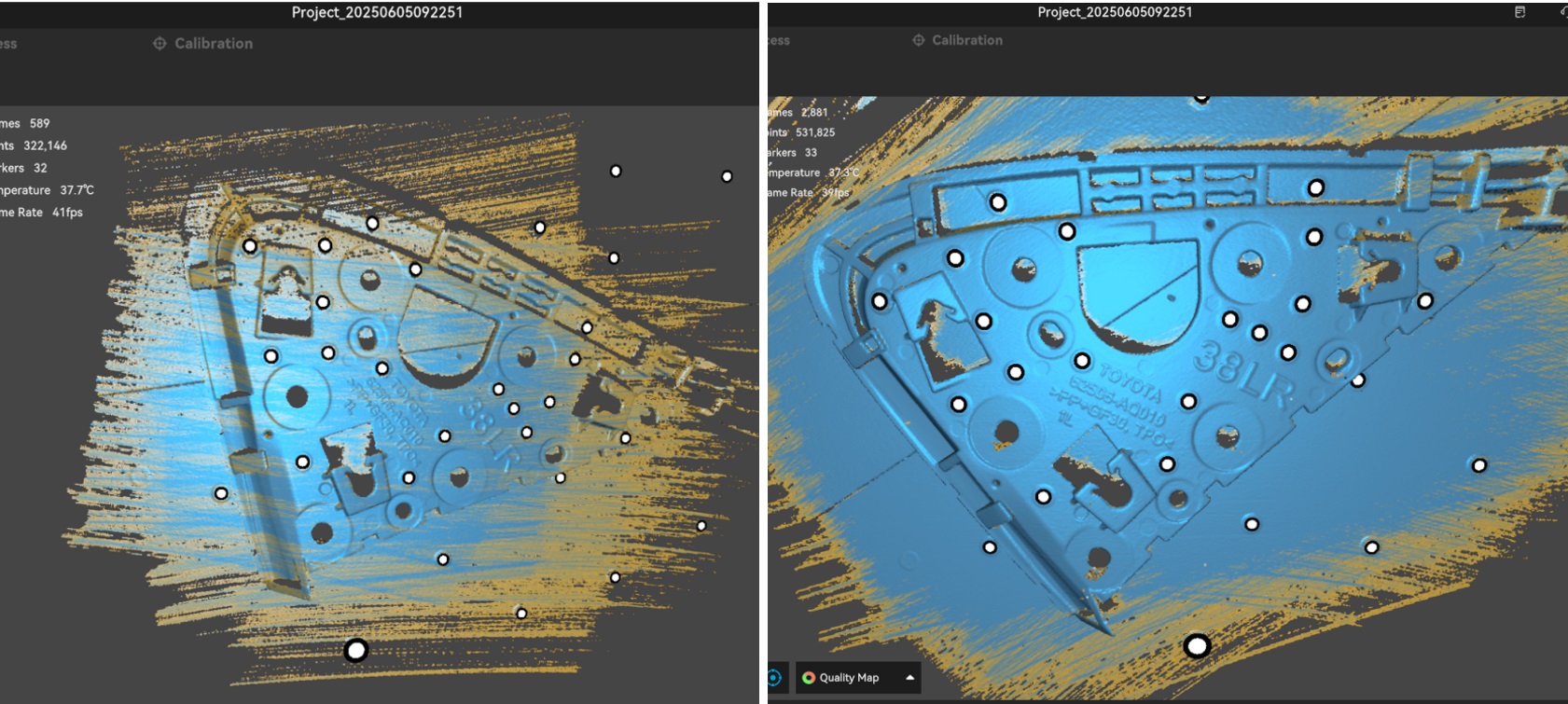
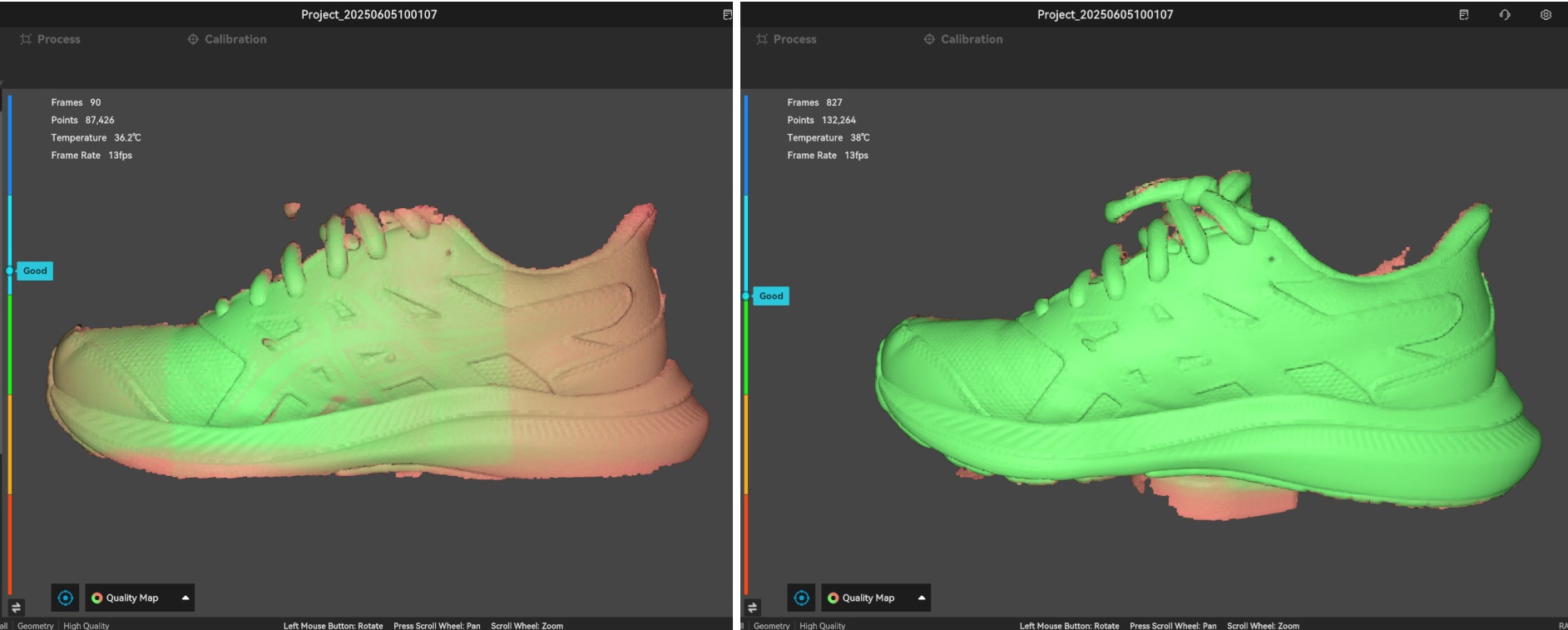
在扫描过程中,Creality Scan提供了扫描质量色谱图,用于指示当前扫描质量是否足够高。下图是根据点云的质量色谱图确定扫描是否充分的示例。
对于蓝色线激光扫描,应改持续扫描直到模型的质量图谱变成蓝色。 黄色表示扫描不够充分。
对于红外扫描模式,左侧的对象显示了红色和绿色的混合,表明所扫描的点云质量相对较差,而右侧的对象呈均匀的绿色,表明所扫描的点云质量相对较好。
¶ 3.6 点云融合
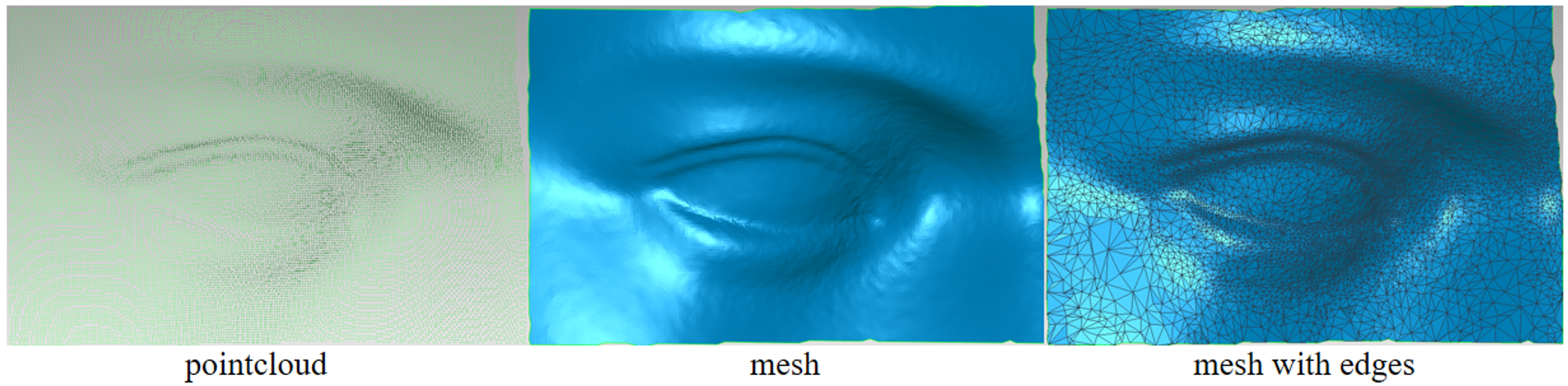
扫描完成后,需要进行点云融合,以融合扫描得到的多个点云帧(数百甚至数千帧),并获得更高质量的点云。
点距 是这一过程中的重要参数之一。较小的点距设置会捕捉模型中更多的细节,但可能需要更长的处理时间。然而,设置点距过小,例如0.02毫米,可能导致模型部分缺失。
当处理较小的对象,如25厘米以下的对象,或者追求更好的细节时,建议将点距设置为0.1毫米或0.15毫米。使用0.1毫米的点距,我们可以为大多数对象获得足够好的细节。
对于蓝色线激光扫描,软件要求用户设置两个点距:实时扫描阶段的点距和点云融合阶段的点距。
¶ (1) 实时扫描阶段的点距
此时的点距主要影响实时扫描渲染的质量,和影响最终的3D模型。点距越小,实时扫描渲染的模型越精细,但会消耗更多内存。对于较小的物体,建议设置较小的点距。例如,当扫描一个10厘米的零件时,可以将点距设置为0.15mm。对于较大的物体,建议使用较大的点距进行扫描。例如,当扫描车门时,可以将点距设置为0.5mm。
.png)
¶ (2) 点云融合时的点距
它会直接影响最终模型的细节。点距越小,细节越好,但需要更多的处理时间和内存。对于大多数物体,0.1mm 的点距可以实现良好的细节。如果使用 0.02mm 的点距,处理时间和内存将急剧增加。对于较大的物体,建议使用较大的点距。例如,扫描车门时,可以使用 0.5mm 的点距。
.png)
降噪等级:该值越低,保留的数据越多。
移除标志点:该功能仅在使用蓝色激光扫描或跟踪模式设置成标志点时显示,用于移除标志点并填充相应的孔洞。
超级细节(仅在使用蓝色线激光扫描时显示):启用后,点距可设置为更小值。(电脑内存大于 8GB 时才会生效)
CrealityScan软件允许用户多次执行点云融合。例如,如果对当前的优化结果不满意,可以修改参数并重新运行点云融合步骤。
¶ 3.7 一键处理
一键处理是为那些对3D扫描仪没有太多经验的初学者设计的。
如果期望更好的扫描质量,不建议使用一键处理,而是手动调整每个处理步骤的参数。
.jpg)
¶ 3.8 模型编辑
Creality Scan软件提供了模型编辑的功能。
扫描完成后,可以立即使用点云编辑功能来删除不必要的部分,这可以加速数据处理过程。
| 图标 | 功能说明 |
 |
贯穿选择,支持选择选定区域后方的网格。对于原始点云数据,穿透选择默认始终生效,无法禁用 |
 |
套索,随鼠标滑动选中区域 |
 |
矩形,矩形选中区域 |
.png) |
连通域,选中点击区域所有相互连接的点 |
 |
反选,自动选择反向未选择区域 |
 |
取消选择 |
 |
删除,删除选中的部分。 |
 |
撤消,撤消上一次删除的操作。 |
 |
还原,恢复上一次删除的操作。 |
 |
取消编辑 |
 |
保存编辑 |
.png)
¶ 3.9 构网
构网操作将点云数据转换为三角形网格模型
在进行构网的过程中,可以手动配置生成网格的面数、调整网格的平滑程度,并选择是否填补孔洞和封闭模型。
网格面片数越多,模型越精细,但生成网格的时间也越长。
.png)
¶ 3.10 纹理贴图
Raptor扫描仪配备了高清RGB摄像头,可用于捕捉3D模型的真彩纹理。

左:带纹理的3D模型;右:网格模型
完成封装后,如果在扫描设置中开启了彩色贴图功能,可以点击 网格处理->彩色贴图 进行贴图。

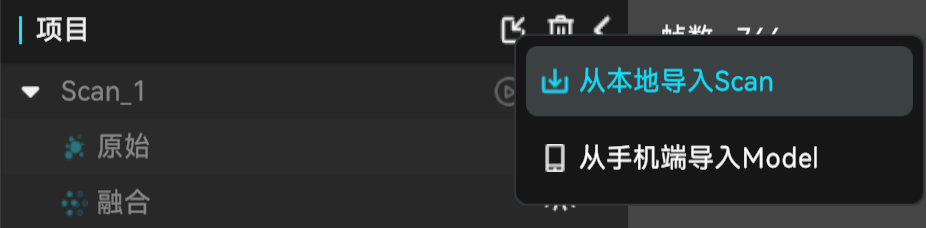
¶ 3.11 导入历史工程
扫描时如果不想等待后处理完成,可以点击“完成”。未来可使用“导入扫描文件”功能将扫描的工程文件导入软件进行后处理。
¶ 3.12 多工程拼接
如果无法一次性扫描捕获物体所有数据,您可以进行多次扫描,然后通过拼接功能将它们组合成一个完整的模型。这对于扫描较大的物体非常有用。
.png)
如何扫描物体的底部?
当需要扫描物体的底部时,可以将物体放在桌面上,先扫描可见部分。然后,“新建扫描”,并将物体侧放或倒置进行另一次扫描。使用多工程拼接功能将这两组点云拼接在一起,得到物体的完整3D模型。在两次扫描期间,请确保捕捉到足够的重叠区域。
完成第一次扫描并进行点云优化后,您可以通过选择“新建扫描”开始新的扫描。
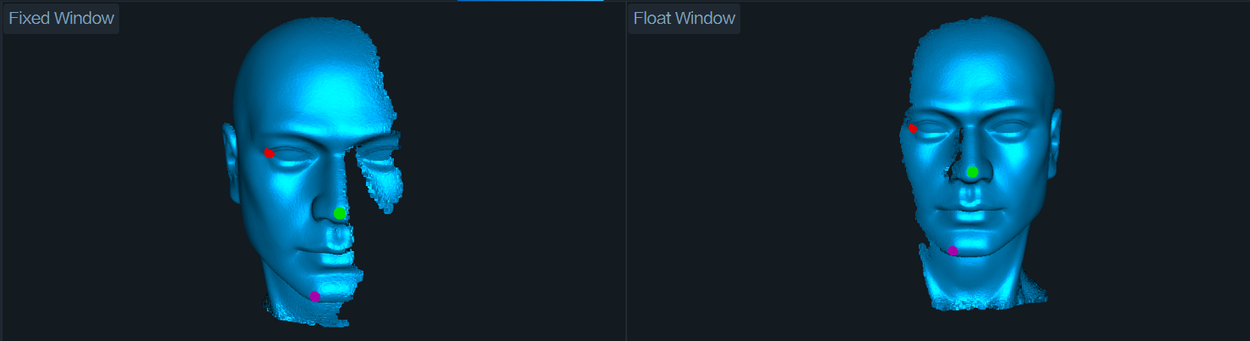
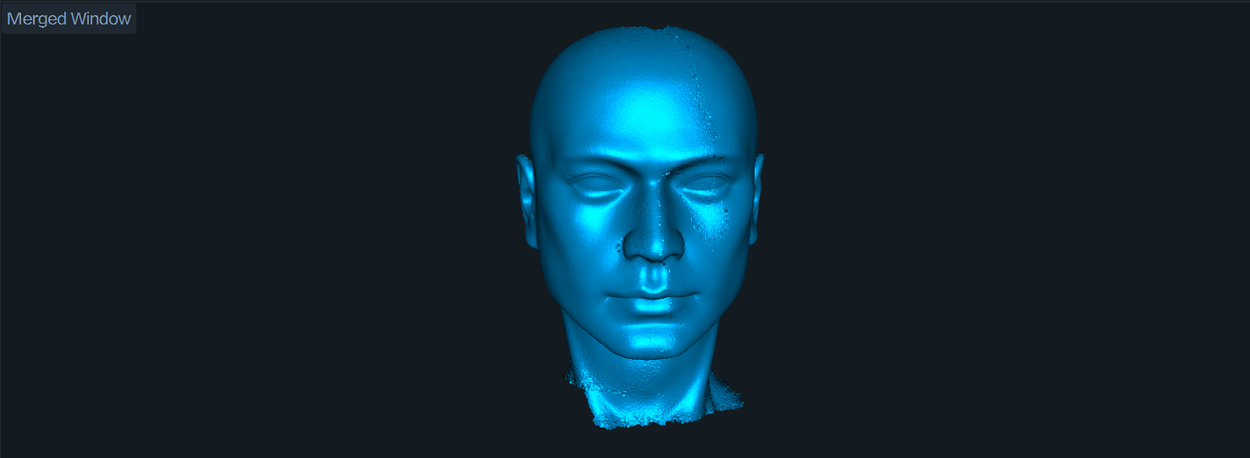
.png)
在多工程拼接页面上,可以通过自动或手动的方式合并融合的点云。下面是手动多工程拼接的示例,其中手动选了3对点。
¶ 3.13 标定
当扫描仪受到碰撞或长时间未标定时,使用搭配的标定板进行标定可恢复扫描仪的测量精度。
此外,如果扫描精度要求较高,请在开始标定前预热 30 分钟,并在标定完成后开始扫描目标。如何进行标定可以参考下面的视频教程。
¶ 4. 扫描案例和技巧
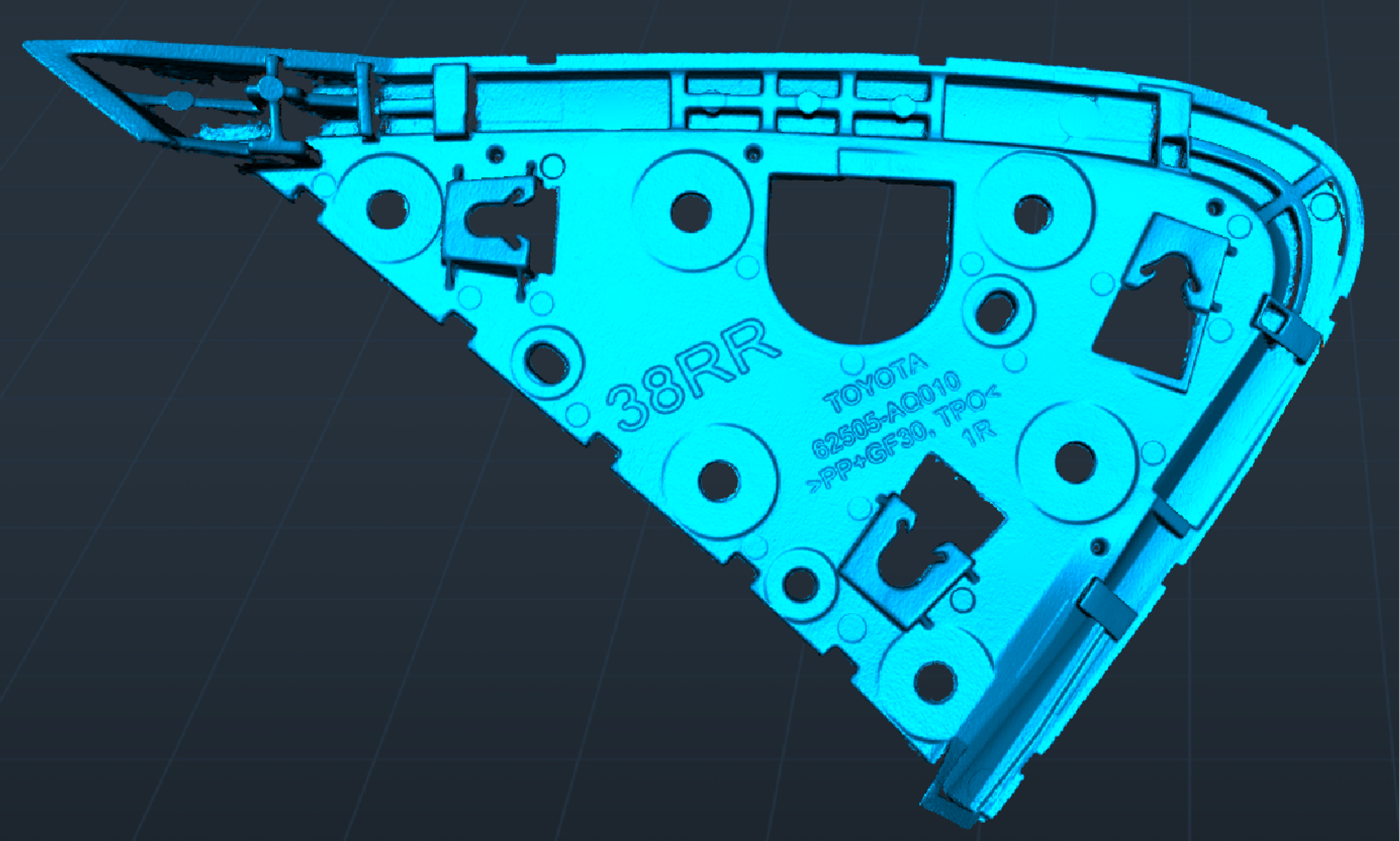
¶ 4.1 机械零件
后视镜内壳
尺寸:220x130x25(mm)
设置: 蓝光,无贴图,分辨率0.1mm,4000帧

螺丝钉
设置:蓝光,无色,分辨率0.1mm
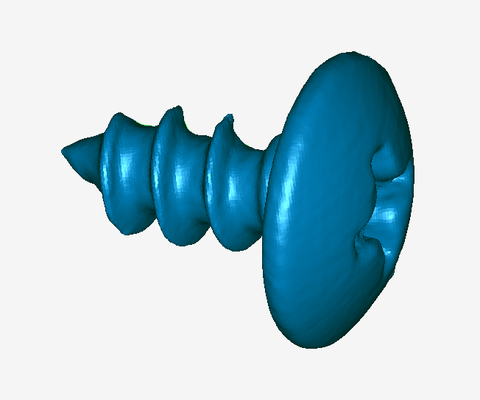
螺纹直径 4.5mm, 1600 帧
螺纹直径7mm
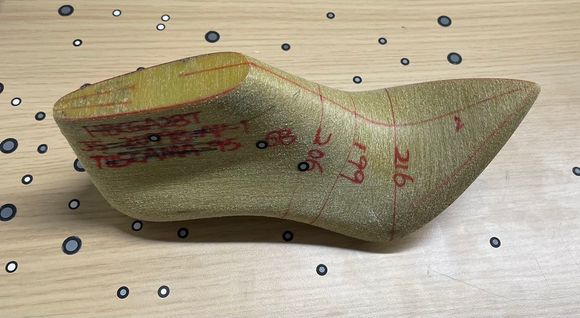
¶ 4.2 模具设计
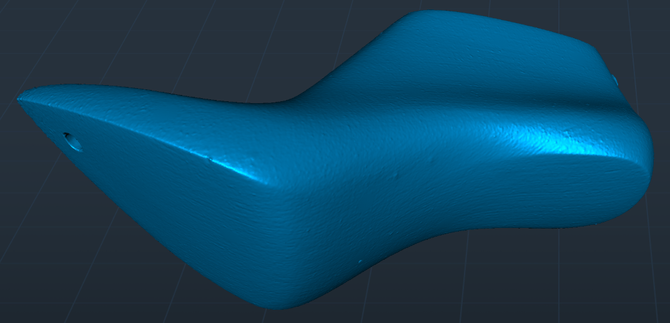
鞋楦
设置:蓝光,无色,分辨率0.1毫米,6000帧(由两次扫描拼接而成)
¶ 4.3 汽车零件
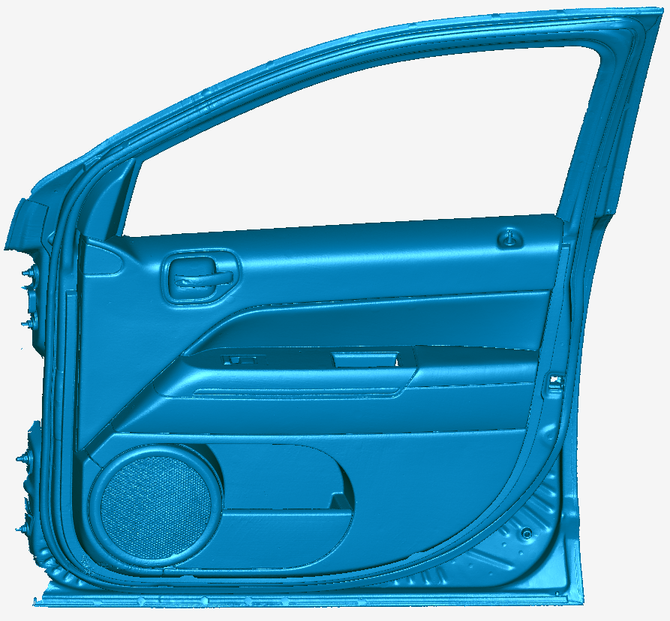
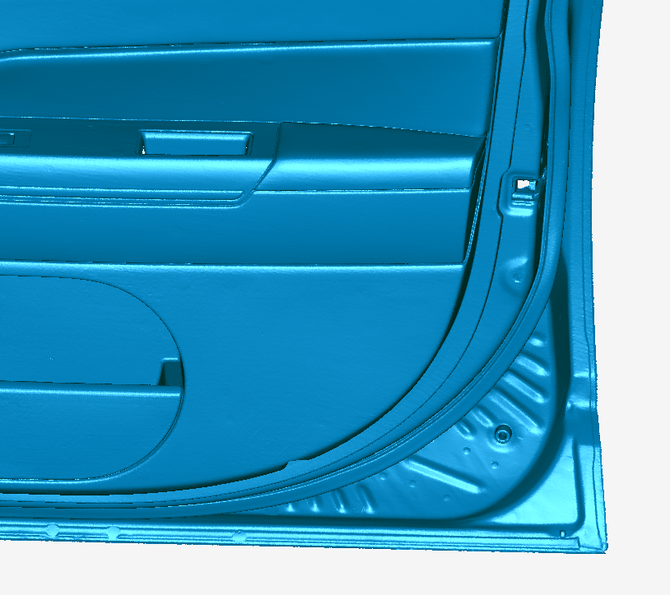
SUV车门
设置:蓝光,无色,分辨率0.3毫米,40000帧
悍马车头
设置:红外线,标记,大物体,分辨率1mm


发动机
尺寸: 641x590x455 (mm)
设置:蓝光,无色,分辨率0.3mm

¶ 4.4 小物体
Airpods Pro2
设置:蓝光,无色,分辨率0.1mm,3000帧

硬币
尺寸: 直径 27mm
设置:蓝光,无贴图,分辨率0.1mm



¶ 4.5 Body/Face人体/人脸
设置: 红外,人体,高质量,分辨率1mm


¶ 4.6 工艺品
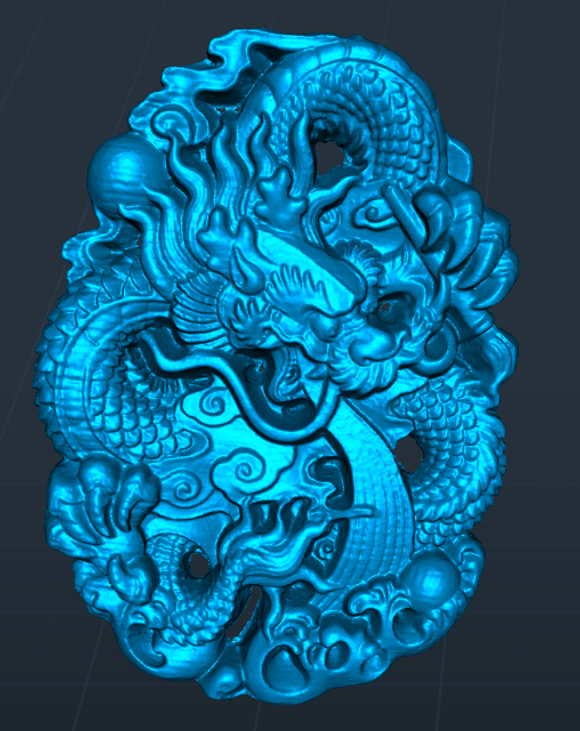
木雕
尺寸: 95x70x17 (mm)
设置: 蓝光,无贴图,分辨率0.1mm

¶ 4.7 手办
设置: 蓝光,无贴图,分辨率0.1mm