¶ 软件下载
https://www.crealitycloud.cn/software-firmware/software/creality-scan
¶ Windows 10/11 (64-bit)
推荐配置 CPU i7-Gen8及以上,Nvidia显卡(显存6GB及以上),内存16GB及以上
软件版本 Creality Scan≥v3.1.22
¶ macOS
推荐配置 CPU 苹果M1/M2/M3/M4系列处理器,内存16G及以上
系统版本 macOS 11.7.7及以上(Big Sur/Monterey/Ventura)
软件版本 Creality Scan≥v3.1.22
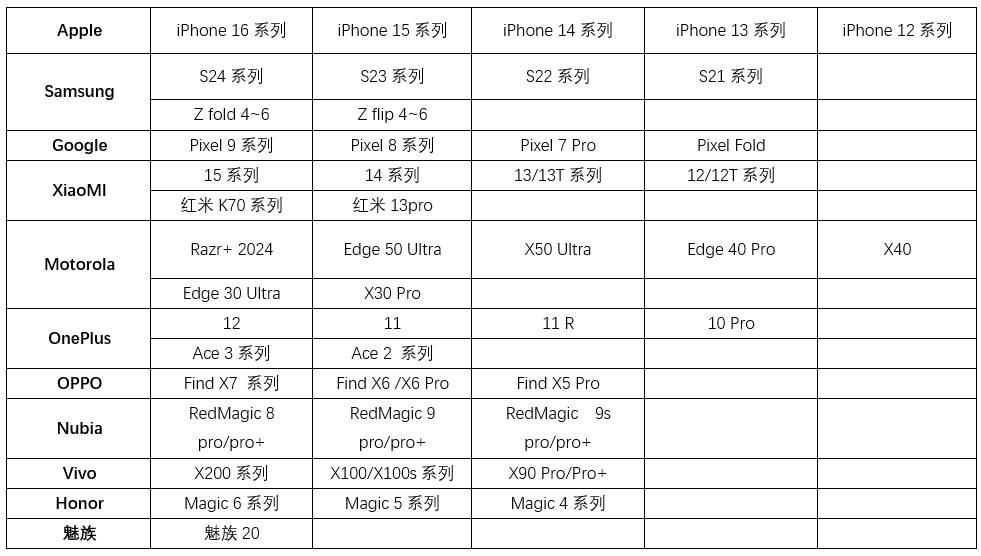
¶ 手机
推荐手机型号清单:
¶ 首页
.png)
在首页左侧信息栏检查扫描仪是否连接成功,建议使用USB3.0连接扫描仪;信息栏会显示设备基本信息,支持进入标定页面;
① 左侧栏 是首页、使用指南、发现三个入口,右上角的设置按钮支持切换语言。
② 中间栏是“最近项目”的多工程列表,点击对应的图片打开对应的多工程,“回收站”可还原或彻底删除工程,“搜索栏”可搜索已有工程
③ 点击“新建项目”开启扫描;点击“打开”选择“打开工程或模型”从本地文件夹导入多工程(.obp格式)或查看模型(.stl、.obj、.ply格式);点击“从手机导入”通过局域网从移动端APP导入工程,注意保持手机和电脑处于同一个局域网下。
¶ 快速标定
参考链接:
Raptor系列标定如下:
https://www.bilibili.com/video/BV1X7KZzmEAt/?spm_id_from=333.1387.list.card_archive.click
设备连接后,通过首页设备卡片的标定按钮进入。
.png)
首次使用务必对准随包配套的标定板的背面,扫描二维码。 进入采集流程后,注意将扫描仪对准标定板正面,按照引导移动扫描仪。
.png)
左右俩侧为 流程引导 区域,展示当前采集所需要的位姿角度要求,注意按照图示匹配扫描仪和标定板的方向,标定板在桌面摆放时注意箭头朝上。
.jpg)
底部左侧显示标定板的编号和扫描仪温度,请注意在合适温度范围内进行标定;最右侧显示当前所处的步骤
中间引导区域主要用于实时引导扫描仪的位姿,随着各个位姿采集完成右侧会逐个点亮顺序步骤。
1)左侧引导区域主要是指引扫描仪的前后左右方向
2)右侧引导区域主要是引导扫描仪的高度调节
标定时根据引导移动扫描仪至目标位置,使得俩个扫描仪模型重合,完成位姿的采集,如下图所示
.png)
当前位姿采集完成后,会自动进入下一个位姿的采集。
请按照引导要求移动扫描仪如此反复完成全流程所有位姿的采集,完成采集后将自动进入标定处理,请耐心等候标定结果。标定成功后请开启扫描进行高质量扫描的体验。
¶ 扫描配置
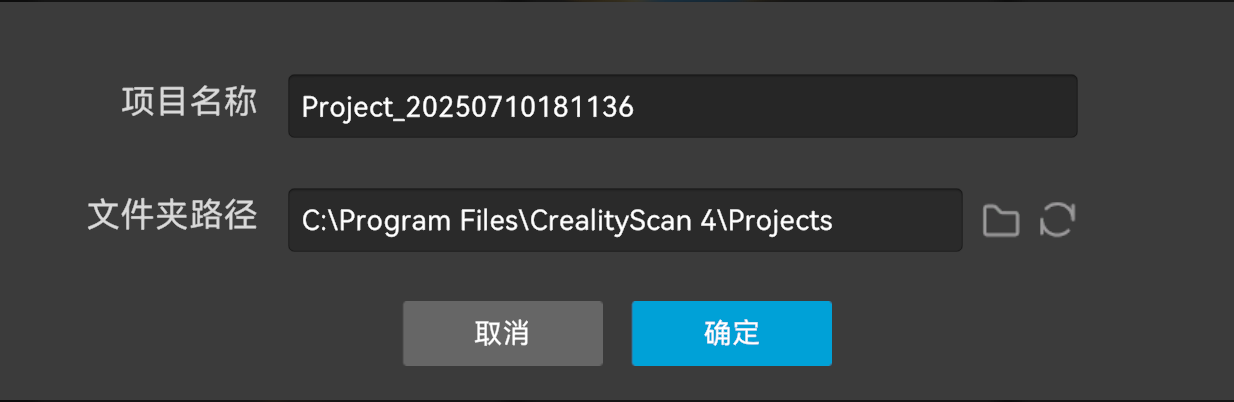
在首页中点击”新建项目“,如下图:
.png)
在弹出栏输入项目名称,并选择文件夹路径,然后点击”确认“按钮,如下图:
建议把扫描对象的名字作为工程名称方便后续识别文件。
点击页面后,进入扫描设置页面。
.png)
¶ 蓝色线激光模式/红外模式选择
选择蓝色线激光模式还是红外模式扫描,需根据具体的扫描需求和物体特性来决定。
-
“蓝色线激光模式“ 适用于细节丰富以及表面材料特殊的物体扫描,尤其适用于对于精度要求高的工业制造与检测场景,需要圆形反光标志点进行扫描追踪;
-
“红外模式”适用于快速扫描,支持几何追踪(无标记点,适合扫描人体、人脸、雕塑、文物等目标)、纹理追踪及标志点追踪,在人脸/人体扫描(红外结构光为不可见光,对人眼无害)、医疗康复、文物和艺术品数字化以及对环境光敏感的场景中表现出色。
¶ 追踪模式选择(红外模式需设置)
- 几何模式:依赖物体的几何形状进行追踪。对于具有丰富、不规则几何特征的对象,建议使用几何模式进行扫描;
- 纹理模式:适用于具有丰富、不规则纹理但几何特征有限的对象(如带图案的花瓶、油画等);
- 标志点模式:若物体的几何和纹理特征都不明显,可以使用标志点模式进行扫描。此模式需要在对象表面或周围贴反射圆形标志点辅助追踪。对于大型对象,应使用内径为6mm的标记点,而对于小型对象,则可以使用内径为3mm的标记点。

¶ 点云扫描/框架点扫描
对于中大物体(≥250×250×250 mm2),推荐先扫描框架点再扫描点云, 在节省模型所占内存空间的同时更快捕捉物体特征、获得更高的模型精度。
.png)
¶ 移除平面基底
单击进行开启或关闭,该功能实时生效,开启时可去除扫描过程中会影响扫描结果或不需要的平面。当扫描对象特别小扫描距离大的时候,比如只有几厘米大,建议在桌面粘贴标志点后,采用标志点模式进行扫描,此时不选择去除基底。当扫描桌子上的对象较小但无需在桌面粘贴标志点辅助时,推荐开启此功能。
¶ 实时扫描
设置扫描配置,点击“预览”后即可进行图像和点云的预览,此时就可以调整曝光/激光亮度(若选择的是蓝色线激光模式)。点击”开始“正式进入实时扫描(界面如下),扫描时依然可以调节曝光/激光亮度。
.png)
以下为实时扫描界面说明:
-
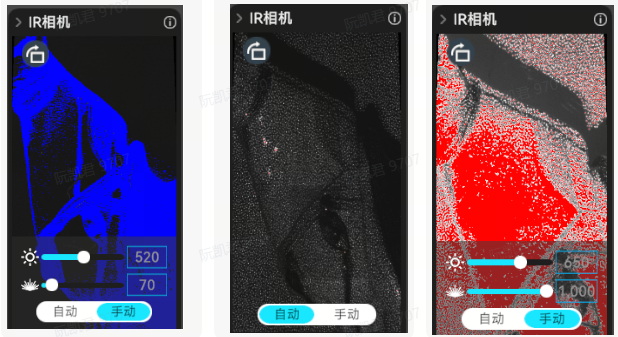
深度相机预览窗 :右上窗口显示深度相机的IR图像
切换“手动”模式可手动调整IR曝光以获得最佳点云效果。
.png)
-
RGB相机预览窗: 右下窗口显示RGB相机的彩色图像
可自动或手动调整RGB曝光以获得满意的RGB图像效果。
.png)
-
距离提示,在扫描设置右边,扫描仪与扫描对象的间距在“最佳距离”时采集的点云是最佳的,跟踪稳定性也是最好的。扫描时请关注距离指示条的提醒及时将扫描仪控制在最佳距离范围内。
- 支持将距离指示条切换为游标模式和直方图模式,新手用户建议使用游标模式,专业用户建议使用直方图模式。
- 调整扫描范围支持调节点云采集的距离范围,范围以外的点云将不会被采集并显示到 3D 点云渲染区。
.png)
- 3D 点云渲染区: 主区域用于预览扫描仪采集的当前帧点云和历史采集的点云。
光标进入 3D 点云渲染区可以操作点云
| 鼠标按键 | 笔记本触控板 | 操作 | 备注 |
|---|---|---|---|
| 鼠标左键 | 单指按下 | 按住并拖动以选择点云 | 暂停扫描 |
| 中键按下 | 双指按下 | 按住并拖动以旋转点云 | 暂停扫描 |
| 中键滚动 | 双指上/下滑动 | 滚动放大/缩小点云 | 暂停扫描 |
| 鼠标右键 | 单指按下 | 按住并拖动以平移点云 | 暂停扫描 |
回正:在扫描暂停阶段,在操作点云后支持将点云返回到暂停时视图中物体视角及大小的状态。
点云渲染模式切换:支持切换为彩模、白模、质量色谱三种模式,默认显示色谱。质量色谱模式下,建议先充分扫描到扫描对象的点云变为绿色后“完成扫描”进入后续处理。左上角显示当前已采集帧数、历史采集点的数量、当前扫描的设备温度、采集帧率。
- 当前状态显示: 左上角显示当前已采集的帧数、历史采集的点云数、当前扫描仪设备温度、采集帧率。左下角显示型号,固件,扫描配置,右下角显示可用内存。
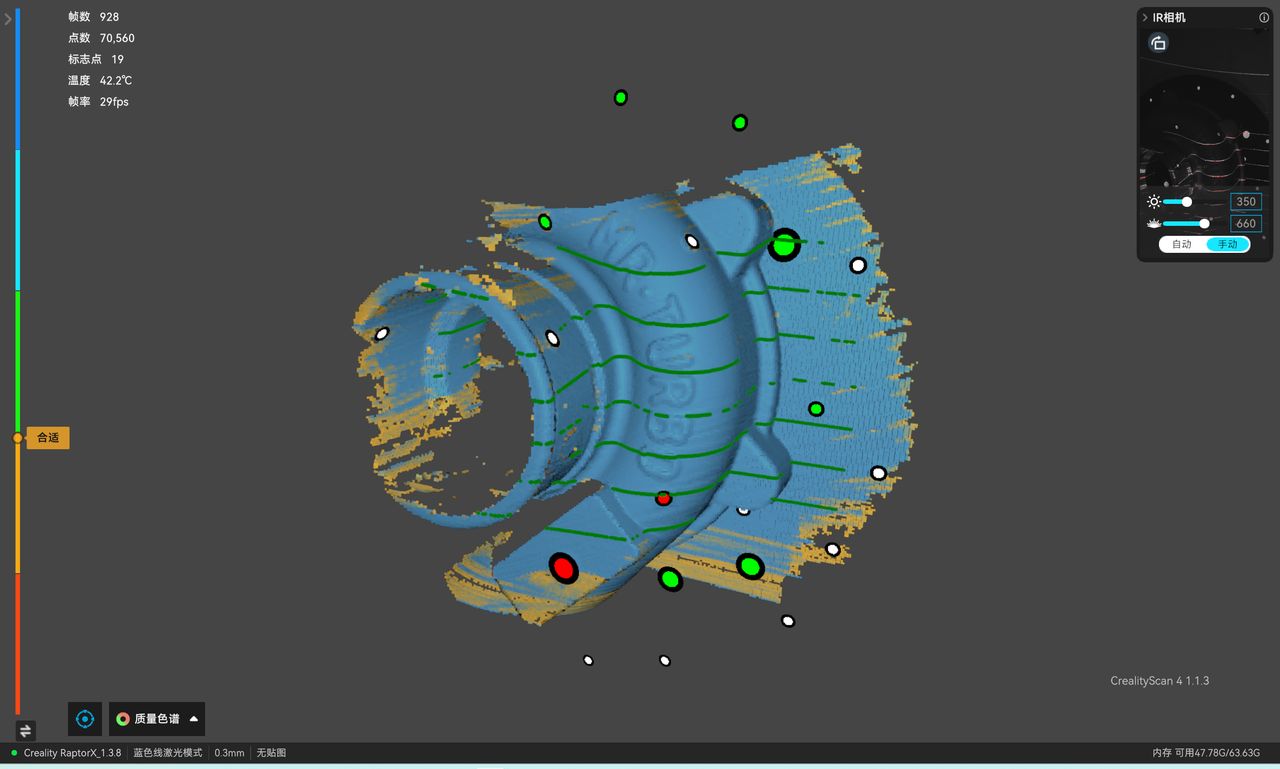
¶ 蓝色线激光模式
为追求扫描质量,建议蓝光线模式不贴图。
与红外模式的差异主要如下:
1)深度相机预览窗,点击展开菜单激光亮度调节,在半户外场景时,支持手动调大,减少阳光的干扰。调节时注意该窗口正常曝光(无呈现蓝色或红色)。
2)不支持撤销/恢复。
蓝色激光扫描操作提示:
1)预览时调整IR曝光和激光亮度确保深度相机预览窗的标志点和激光线为正常曝光的状态(参考下图,出现蓝色代表曝光不足,出现红色代表曝光过度,最佳状态是浅白色),将扫描仪对准扫描对象特征丰富的部分,并依据距离指示条调节扫描仪与扫描对象之间为“最佳距离”
2 )单击“开始扫描”进入实时扫描,扫描过程中,在保持相对固定距离的情况下,缓慢往复地移动扫描仪。开启质量色谱模式,对着扫描对象在扫的部分(可以稍微停留1-2秒)直到点云转变为蓝色,再移动对准未扫部分,以持续确保正常曝光和“最佳距离”。
3 )依据界面提醒持续扫描直到扫描对象的点云全部变为蓝色(表示所有物体模型数据都被采集,模型质量高)。(如下图所示)
¶ 红外模式
扫描操作提示:
1.预览时确保深度相机预览窗口为正常曝光的状态(参考下图,出现蓝色代表曝光不足,出现红色代表曝光过度,最佳状态为没有蓝色或红色)。
- IR曝光默认自动曝光(大物体,人体或人脸可采用自动),如果自动模式下曝光效果不佳,可设为手动曝光并调节画面为正常曝光以获取更好的效果。
2.将扫描仪对准扫描对象特征丰富的部分,并依据距离指示条调节扫描仪与扫描对象之间为“最佳距离”。
3.开启质量色谱模式,依据界面提醒持续扫描直到扫描对象的点云全部变为绿色, 表示所有物体模型数据都被采集,模型质量高。
.png)
¶ 处理页
完成扫描后,支持一键处理或手动处理,手动处理顺序为 融合-封装-彩色贴图,在点云融合后可以选择对点云进行编辑或用于多个点云拼接。
主窗口主要用于显示点云或模型。光标进入 3D 模型预览区域操作点云/网格模型,如下:
| 鼠标按键 | 笔记本触控板 | 操作 | 备注 |
|---|---|---|---|
| 鼠标左键 | 单指按下 | 按住并拖动以选择点云 | 暂停扫描 |
| 中键按下 | 双指按下 | 按住并拖动以旋转点云 | 暂停扫描 |
| 中键滚动 | 双指上/下滑动 | 滚动放大/缩小点云 | 暂停扫描 |
| 鼠标右键 | 单指按下 | 按住并拖动以平移点云 | 暂停扫描 |
¶ 左侧多工程面板
显示当前打开的多工程列表。每个子工程处理过程中段最多解锁三种数据状态,分别是原始(点云)、融合(点云)、标志点。网格、贴图单独显示在工程最后,可手动切换显示。用户可以单击鼠标右键进行删除和重命名。
.png)
工程面板右上角有两个按钮选项
- 导入工程作为当前多工程的子工程:从本地导入/从手机端导入。
- 删除当前的子工程。
¶ 点云融合
在扫描界面点击“点云融合”进入点云融合界面。
.jpg)
点云融合以获得更好的 3D 点云模型。实现这一功能有两种方法。标准模式网格更完整,小的孔洞会被填充,处理耗时较长。快速模式网格更保真,边缘更准确,能保留更多的孔洞,处理时间短。
.png)
降噪等级: 该值越低,保留的数据越多。
移除标志点: 该功能仅在使用蓝色激光扫描或跟踪模式设置成标志点时显示,用于移除标志点并填充相应的孔洞。
超级细节(仅在使用蓝色线激光扫描时显示): 启用后,点距可设置为更小值。(电脑内存大于 8GB 时才会生效)
Creality Scan软件允许用户多次进行点云融合,例如,如果你对当前的融合结果不满意,可以修改参数并重新运行点云融合步骤。
¶ 封装
在处理界面点击“封装”进入封装界面
将扫描的 3D 点云数据映射到网格。用户可以自定义参数,面片数、平滑等级、是否补洞、是否移除标志点、封闭等。
.png)
- 平滑等级越高,网格越光滑。
- 补洞模式会自动填补模型的孔洞。
- 封闭模式会自动生成模型缺失的表面,生成一个几何封闭的 3D 模型。非封闭模式不会自动生成缺失的表面。
¶ 点云/封装编辑
扫描完成后的原始点云和融合点云可以使用下方边栏的编辑工具进行编辑处理。
同样,封装后的网格模型可以进行编辑处理( 还可以点击上方工具栏的“编辑”按钮进行“网格简化”、“网格平滑”或“补洞”操作)。
| 图标 | 功能说明 |
|---|---|
| 贯穿选择,支持选择选定区域后方的网格。 对于原始点云数据,穿透选择默认始终生效,无法禁用 |
|
| 套索,随鼠标滑动选中区域 | |
| 矩形,矩形选中区域 | |
| 连通域,选中点击区域所有相互连接的点 | |
| 反选,自动选择反向未选择区域 | |
| 取消选择 | |
| 删除,删除选中的部分。 | |
| 撤消,撤消上一次删除的操作。 | |
| 还原,恢复上一次删除的操作。 | |
| 取消编辑 | |
| 保存编辑 |
.png)
¶ 多工程拼接
当多工程面板里存在至少 2 个经过点云融合后的工程,在处理页通过点击“拼接”进入拼接页面。
.png)
多工程拼接提供特征自动、特征手动、标志点自动、标志点手动四种模式,左侧列表顶部可切换模式:
- 自动拼接(特征、标志点)需要模型之间有足够多的公共特征区域或标志点
- 手动拼接(特征、标志点)需要在固定窗口和浮动窗口的模型上对应的点,至少三对。
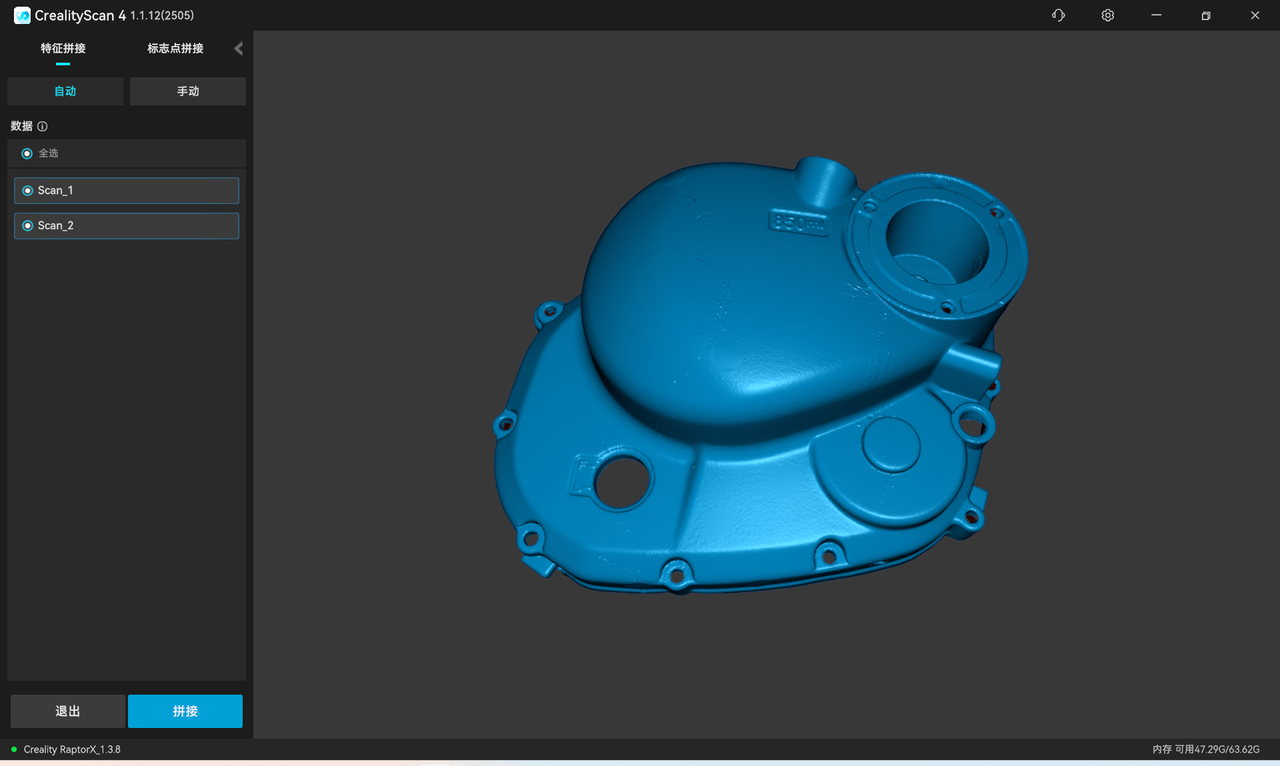
¶ 1.特征自动
左侧边栏为模型列表。特征自动拼接模式下,在模型列表里选择两个目标拼接的子工程,然后点击“拼接”,等待完成拼接即可。
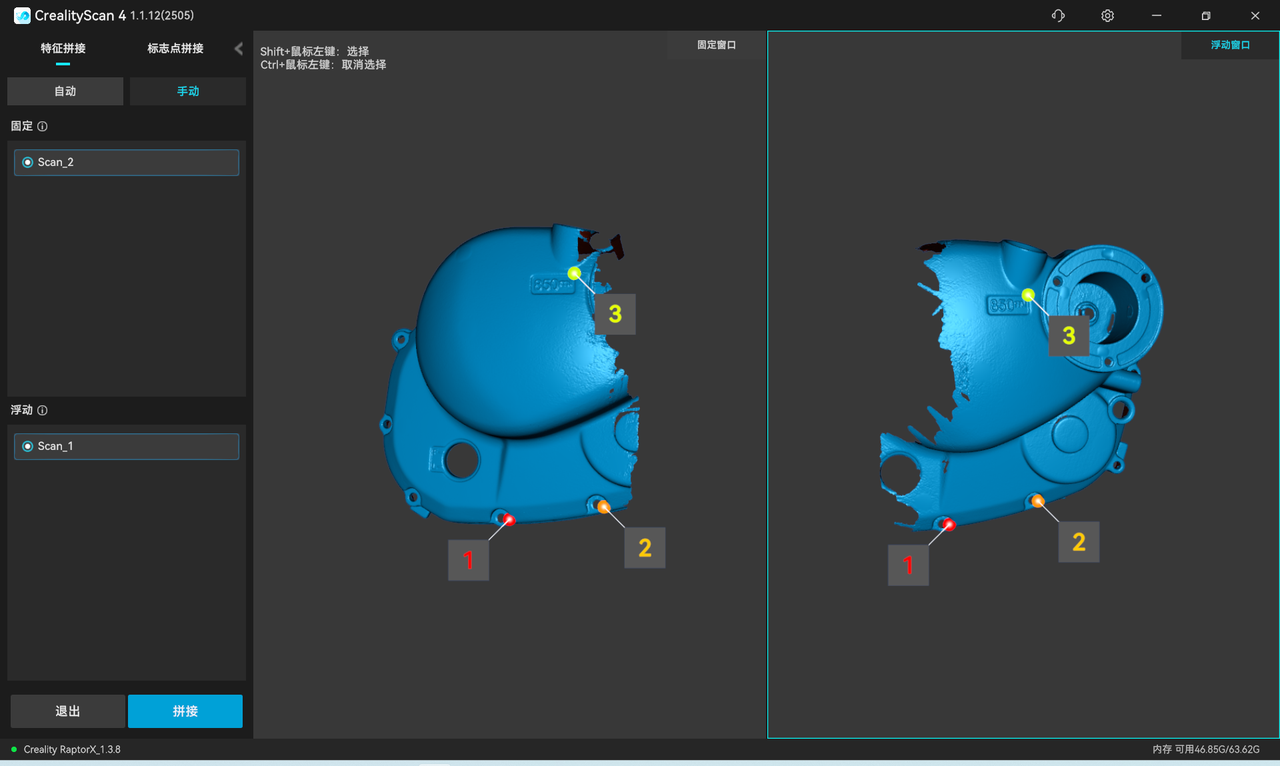
¶ 2.特征手动
左侧边栏中展示固定窗口列表和浮动窗口列表。在手动拼接模式下,在左侧两个列表分别选择一个待拼接的子工程并显示在对应的固定窗口和浮动窗口,然后在固定窗口和浮动窗口的模型上选择至少三对配对的点。
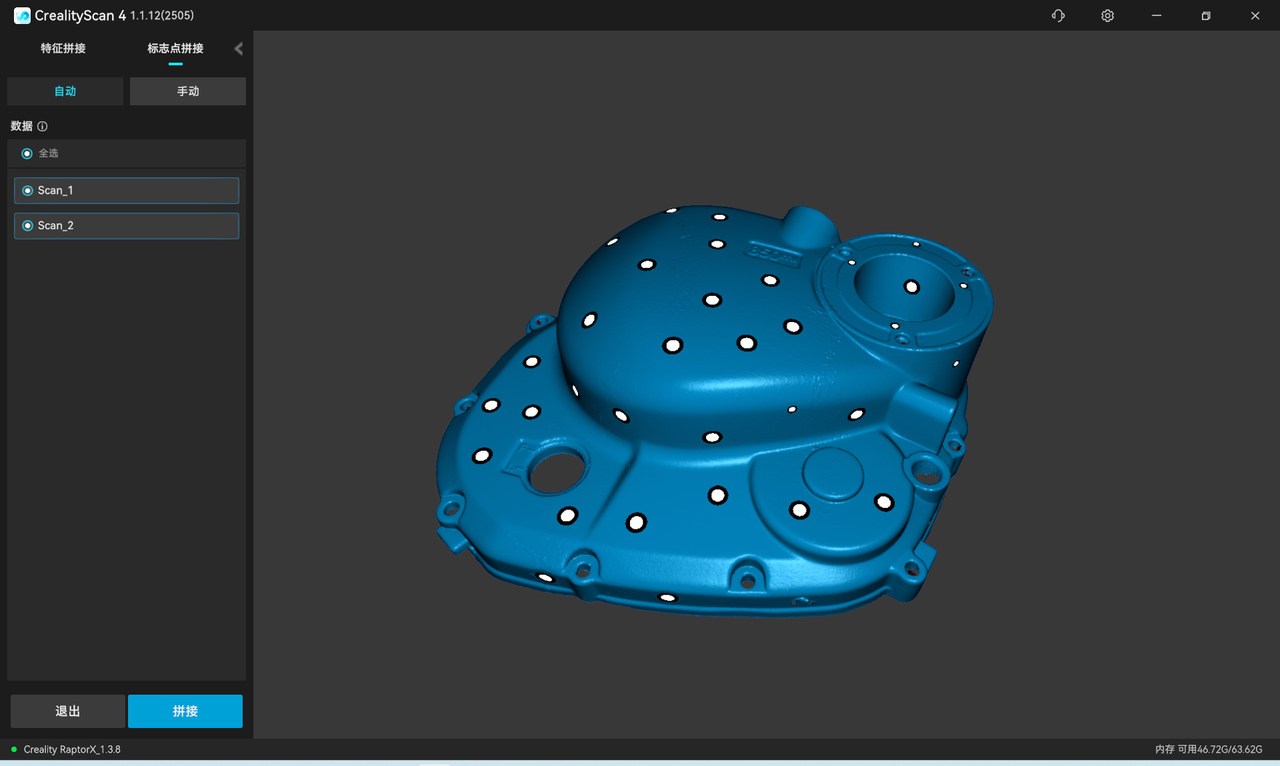
¶ 3.标志点自动
左侧边栏为模型列表。标志点自动拼接模式下,在模型列表里选择两个目标拼接的子工程,然后点击拼接,等待完成拼接即可.
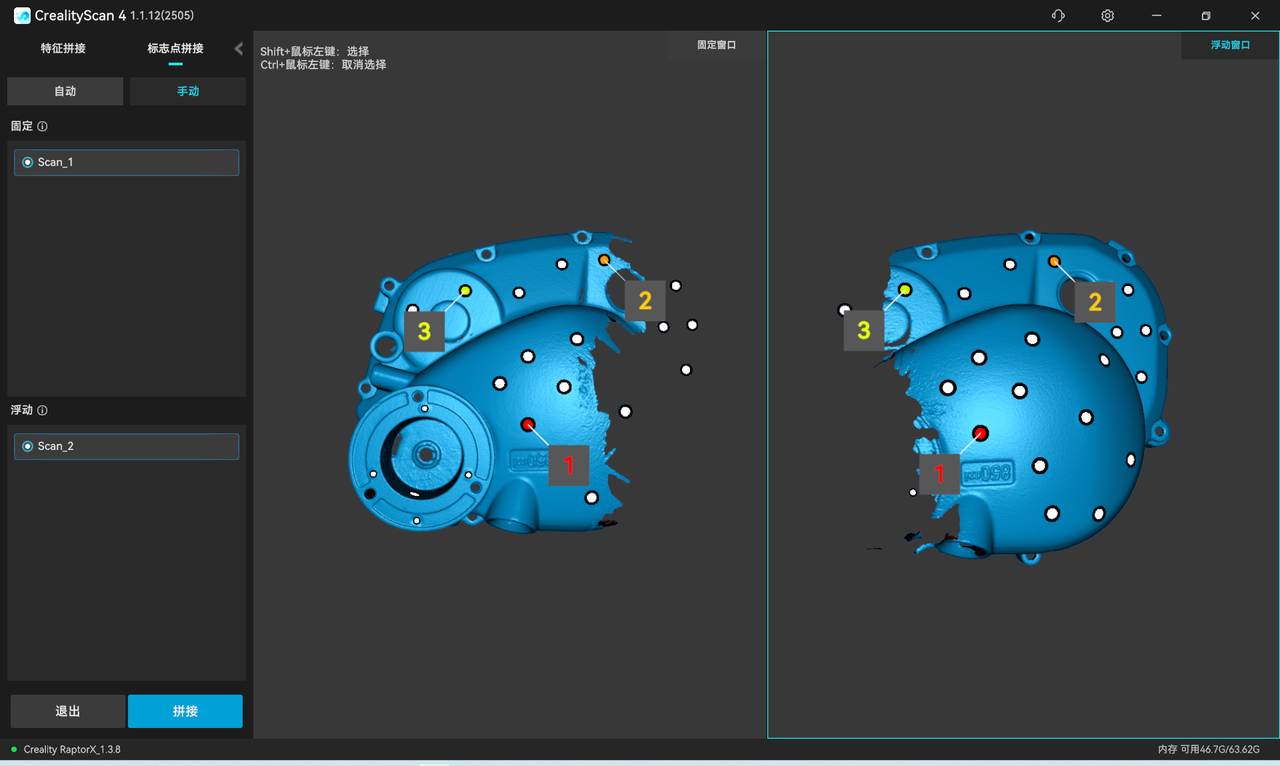
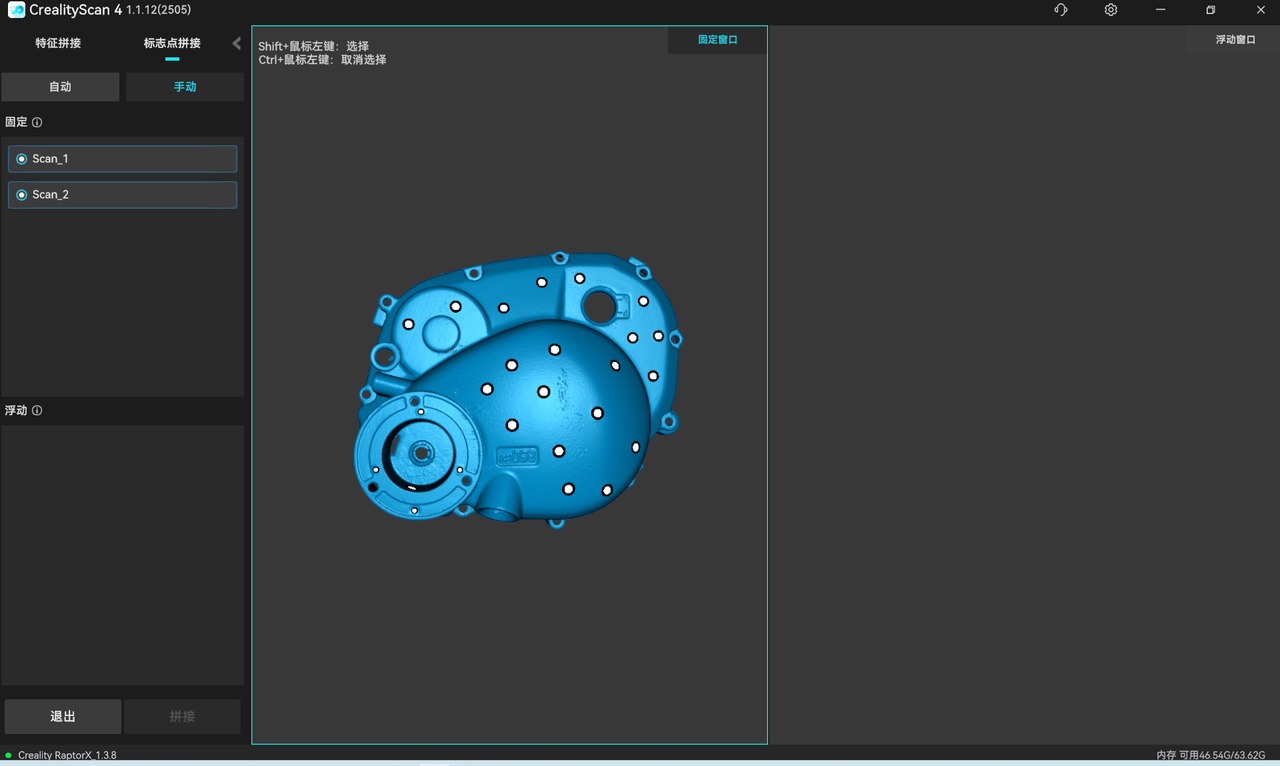
¶ 4.标志点手动
左侧边栏分别为固定窗口列表和浮动窗口列表。在标志点手动拼接模式下,在左侧两个列表分别选择一个目标子工程并显示在对应的固定窗口和浮动窗口,然后在固定窗口和浮动窗口的模型上选择至少三对配对的标志点。
¶ 彩色贴图
匹配网格模型上图像的纹理以提高纹理和颜色分辨率。
完成封装后,如果在扫描设置中开启了彩色贴图功能,可以点击 网格处理->彩色贴图进行贴图。

¶ 导出已完成的 3D 模型
.png)
- 优化点云支持导出 .asc、.ply、 .stl、.obj格式
- 网格支持导出 .asc、.ply、 .stl、.obj格式
- 贴图图像导出时仅支持.ply、 .obj 包(含.obj .mth .png 文件)
¶ 固件升级
固件升级分为自动检测升级和手动升级
- 扫描仪连接成功后,如果软件已连接互联网,将自动检测扫描仪固件版本是否需要升级,手动确认后可进行升级。
- 手动升级固件,通过右侧顶栏的设置-固件升级进入,从下载地址下载对应的最新固件并点击“选择文件”然后单击“立即更新”等待完成即可。
