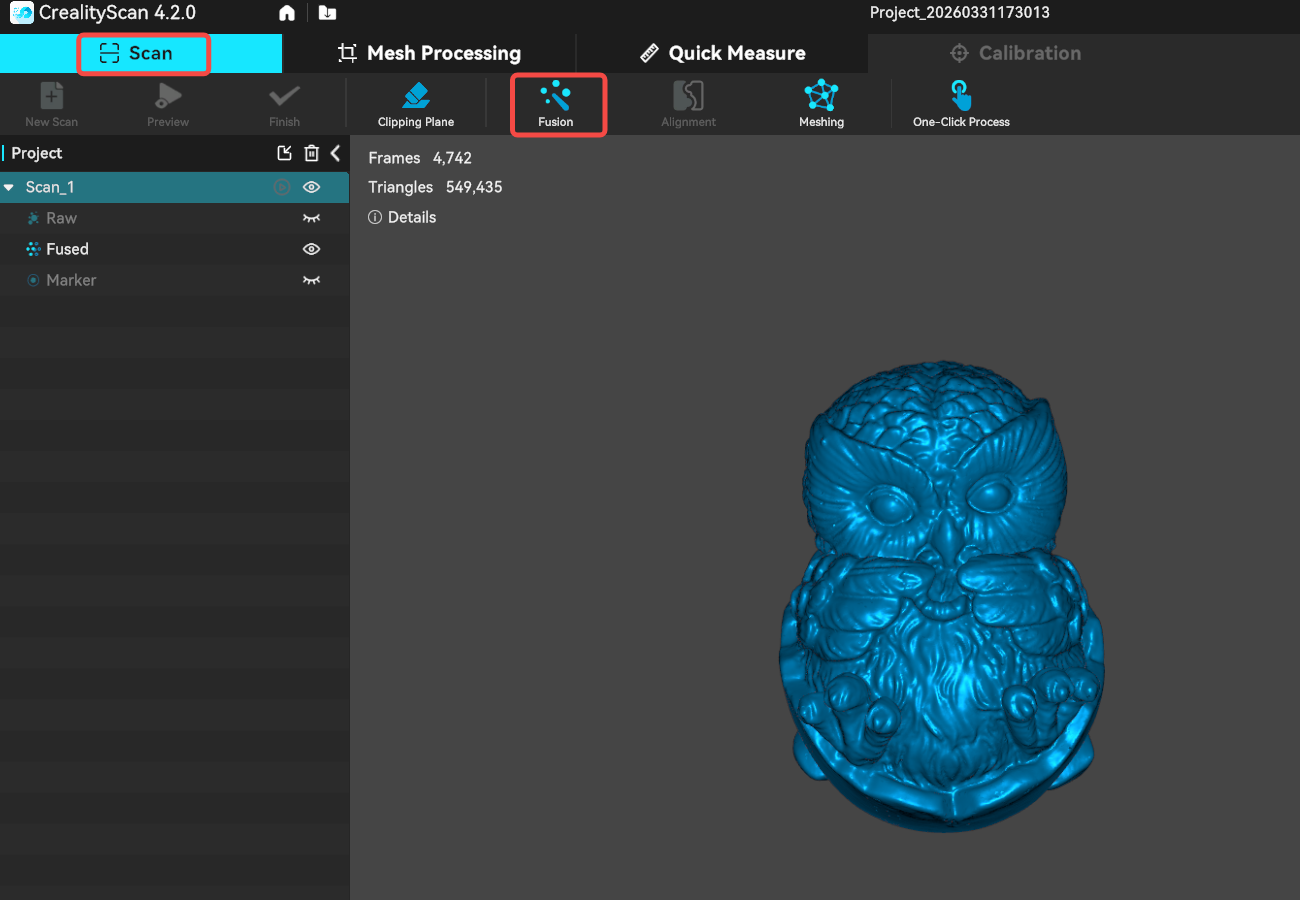
After scanning, point cloud fusion is required. The multiple frames of point clouds (hundreds or even thousands of frames) are fused together to generate a mesh model. Resolution is one of the important parameters in this process. The smaller the resolution setting, the more details of the model will be captured, but the processing time will also be longer. However, if the resolution is set too large, some parts of the model may be missing.
When dealing with smaller objects, such as those below 25cm, or when seeking better details, it is recommended to set the resolution to 0.1mm or 0.15mm. Using a resolution of 0.1mm, we can achieve sufficiently good detail for most objects.
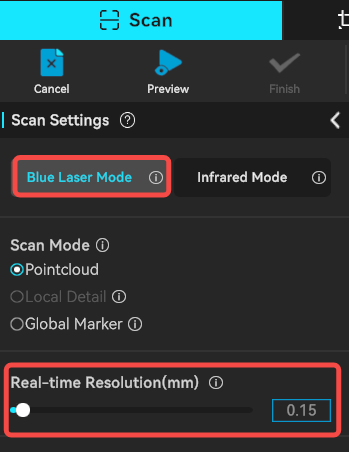
For Blue laser scanning, the software requires users to set two resolutions: the resolution in point cloud fusion stage and the real-time resoluion.
For infrared mode, only the resolution in point cloud fusion needs to be set.
¶ Resolution in Fusion
Scanning Cases: How to set the Resolution?
It will directly impact the details of the final model. The smaller the point distance, the better the detail, but it requires more processing time and RAM. For most objects, a point distance of 0.1mm can achieve good detail. If a point distance of 0.02mm is used, the processing time and memory will increase sharply. For larger objects, it is recommended to use a larger point distance. For example, when scanning a car door, a resolution of 0.5mm can be used.
For cross-lines scanning, we recommend setting the resolution to above 0.2mm, as cross-line scanning is mainly used for medium to large objects.
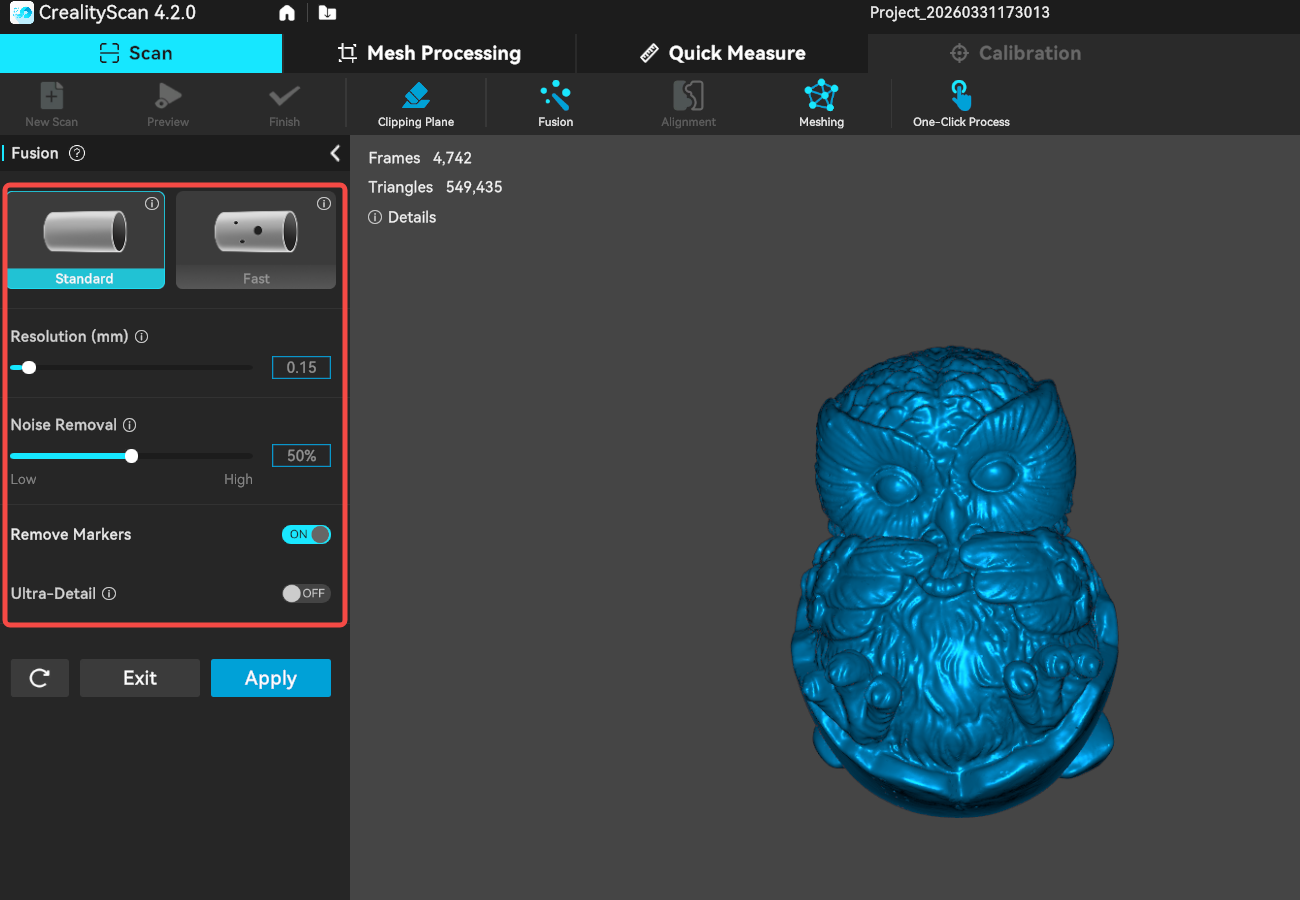
CrealityScan offers two pointcloud fusion methods for Blue laser scanning: Standard and Fast. The Fast mode processes data more quickly and produces meshes with more accurate edges. The mesh obtained using the Standard mode tends to be more complete.
Noise Removal: The lower the noise reduction level, the more data can be retained.
Remove Markers: This function is only displayed when using blue laser scanning or when markers are set in tracking mode. It is used to remove markers and fill the corresponding holes.
Ultra-Detail (only available for Blue laser scanning): The resolution can be set to a smaller value when enabled. (effective only when the computer memory is greater than 8G)
The CrealityScan software allows users to perform pointcloud fusion multiple times. For instance, if you are not satisfied with the current results, you can modify the parameters and re-run the pointcloud fusion step.
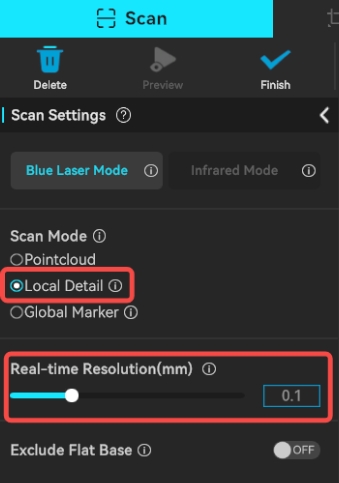
¶ Real-time Resoluion(Avaiable for Blue laser Mode)
The resolution primarily affects the quality of real-time scanning rendering and impact the final 3D model. The smaller the resolution, the finer the model rendered in real-time scanning, but it will consume more memory. For smaller objects, it’s recommended to set a smaller resolution. For instance, when scanning a 10cm part, you can set the resolution to 0.15mm. For larger objects, we suggest using a larger resolution for scanning. For example, when scanning a car door, you can set the dot pitch to 0.5mm.
For cross-lines scanning, we recommend setting the resolution to above 0.2mm, as cross-line scanning is mainly used for medium to large objects.
If you use a large resolution for scanning, how can you achieve good detail? You can utilize the Local Detail Scanning function provided by the software. For example, first scan the entire object at a resolution of 0.5 mm, then switch to Local Detail mode, select the area where you want to enhance details, and perform a scan at a resolution of 0.1 mm to capture the geometric details of that area.